You are already signed in to your MathWorks Account. Please press the "Submit" button to complete the process.
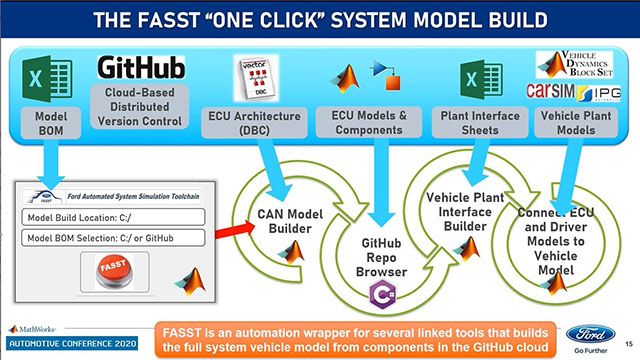
Model-Based Agility with Ford Automated System Simulation Toolchain (FASST)
Robert ter Waarbeek, Ford Nick Adams, Ford Nate Rolfes, Ford Raghuraman Baskaran, Ford Steven Foster, Ford
Modern automotive development times are decreasing while vehicle complexity is rising. The combination of physical parts and millions of lines of code make today’s vehicles among the most complex engineered systems in the modern world. It’s indisputable that issues occurring during development must be fixed before production. Issues like requirements, component implementations, or systems integration are cheaper and easier to fix when detected early. Hence, continuous verification and validation throughout the development cycle is important.
Automotive development is traditionally Gateway driven. The software development community has developed multiple tools and applications which do not fit embedded software development processes.
Ford Automated System Simulation Toolchain (FASST) is a full-vehicle simulation toolchain for ‘distributed’ chassis controls and DAT features used for feature development and verification. FASST is a modern verification method/toolchain that enables Ford engineers to implement continuous integration within their Model-Based Design process.
FASST helps develop and build a virtual vehicle, helping tackle all technical and process-related challenges. It also serves as a virtual factory, building the virtual vehicles in an automated fashion. Similar to just-in-time delivery in the physical world, every delivery of a software component can be tested directly in the virtual world. Continuous verification and validation of an integrated virtual vehicle can then help detect system issues early on and drive quality and reduced verification costs.
Model-Based E-Drive Dimensioning
Florian Loos, ZF Navid Daniali, Z
Setting up an efficient e-drive system that fulfills customers' requirements represents a challenging task. For this purpose, the electrical machine and the power electronics have to be dimensioned appropriately. In this process, many aspects such as efficiency, thermal behaviour, electrical performance, lifetime of the components, and derating concept have to be considered. The electrical machine and the power electronics influence each other as well as the many other components of the driving system.
It is unavoidable to perform measurements and expensive tests to evaluate the performance of the entire e-drive systems. At ZF, we try to reduce measurement costs and to make predictions based on simulation models.
In this talk, we give a short overview on the different aspects of correct e-drive dimensioning and how simulation tools, especially MATLAB® and Simulink®, enable engineers to accomplish the complex processes of designing a good e-drive system.
Evolving Model-Based Engineering Environments to Manage Complexity and Scale
Ramamurthy Mani, MathWorks
Massive change is underway in the automotive industry with trends in autonomous driving, vehicle electrification, and connectivity. In this talk, Ramamurthy Mani shares how MathWorks is addressing complexity, scale, and collaborative workflows in tune with evolving demands on automotive software architectures.
Accelerated Development Using Rapid Control Prototyping
Andreas Top, Continental
Increasing vehicle variants, increasing features, and increased scrutiny on costs leads to increased pressure to ensure that the electronic braking system is prepared for the competitive marketplace.
This project shows a solution whereby engineers can quickly move from SIL to HIL using a Speedgoat system with programmable FPGA technology instead of an original ECU. This solution provides fast development of new control strategies and fast calibration. An additional bonus is more flexibility regarding hardware choice.
Simulink for Virtual Vehicle Development
Eva Pelster, MathWorks
In the presentation, MathWorks engineers will discuss use cases of virtual vehicle simulation and how Simulink® as a platform enables the development and execution of such large-scale models. New Simulink capabilities and relevant model best practices will also be introduced.
AUTOSAR Software Architecture Modeling of Multicore Electric Powertrain Software
Dr. Sakthivel Manikandan Sundharam, Delphi Technologies
Green roads are of vital importance and are achievable by electrical propulsion systems. The electrical powertrain system is driven and controlled by a liquid-cooled, high-voltage inverter. The inverter control software is designed and developed using MATLAB® and Simulink®. MATLAB now includes software architecture authoring capabilities through the recently released System Composer™ and AUTOSAR Blockset™. We are one of the pioneers in using these capabilities for our inverter control software development activities.
In this talk, we share our live project experience in transforming from a legacy approach to a MATLAB and Simulink approach for the software architecture, including the lessons we learned and explorations. In the past, we have used software architecture authoring tools mainly for diagrams and then took them to the requirements database manually. There were no linkages from software requirements to software architectural design, and there was no way to establish the bidirectional traceability between requirements and software architecture. Also, the legacy toolchain was not well suited to AUTOSAR compliant architectural diagrams. With the help of Siemens® Polarion™ ALM Connector for Simulink, as well as System Composer and AUTOSAR Blockset, we addressed these gaps. This seamless approach also helped us to publish the software architecture from the design environment to the requirement database easily. Updated requirements can easily be pushed to design, and this updated architecture can also be published back to the requirements database. Finally, the whole approach helps to generate software architecture documents more conveniently, and that drives the software design and further stages of development lifecycle.
Building a Virtual Vehicle for Fuel Economy, Performance, and Thermal Analysis
Steve Miller, MathWorks
Developing realistic plant and controller models is a critical first step in assembling a virtual vehicle. The models must provide sufficient detail to capture the key effects without slowing the simulation down more than necessary. This requires a flexible modeling approach where multiple tools and modeling methods may be used. This presentation will describe one method to integrate a vehicle model based on Simulink® with multiple Simscape™ domains in order to develop a model for fuel economy, performance, and thermal analysis. It serves as an example of model reuse and adoption of Model-Based Design. Specifically, it will give a broader understanding of how to assemble and simulate complex, multidomain automotive models using a variety of MathWorks products, including Powertrain Blockset™ and Simscape.
What’s New in MATLAB and Simulink for ADAS and Automated Driving
Shashank Sharma, MathWorks
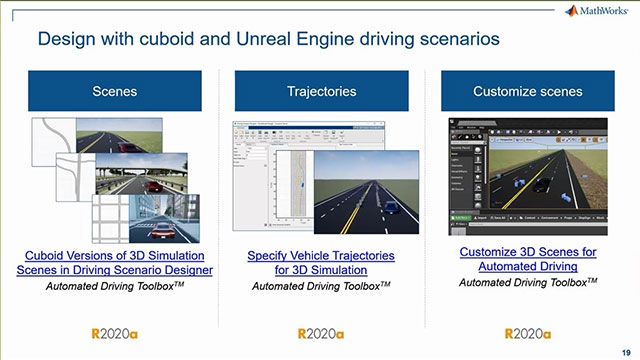
As the level of automation increases, the use scenarios become less restricted and testing requirements increase, making the need for modeling and simulation more critical. In this session, you will learn how MATLAB® and Simulink® support engineers building automated driving systems with increased levels of automation. You will learn about new features in Releases 2019b and 2020a for:
Designing perception, planning, and controls components
Testing by simulating driving scenarios and sensor models
Deploying by generating C/C++ code
You will learn about these topics through examples that you can reproduce when you return to your office.
Framework for Virtual and Physical Testing of Automated Driving Systems
Vladislav Kocián, TÜV SÜD
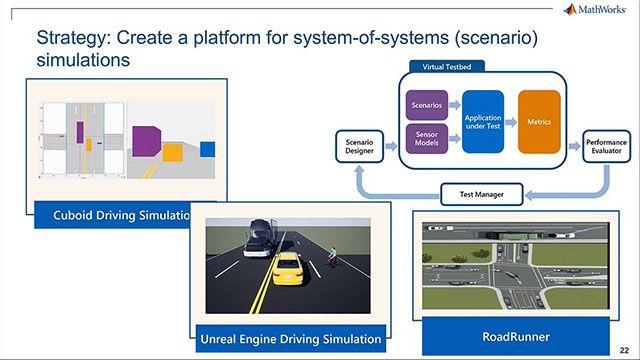
The massive expansion of automated driving (AD) functions brings huge challenges in terms of design and development, but also in function validation and the certification process. To ensure the safety of such systems, it is essential to evaluate automated driving systems within the mandatory certification process before they are deployed on the road. The number of regulations and standards that consider the safety of AD gradually increases, and current safety standards and regulations still must be adopted and enhanced. Having a strong legislative basis is the key factor for the introduction of highly automated vehicles to the market. For conventional vehicles, we have a well-established homologation process. For automated driving, a theoretically infinite number of traffic situations must be tested to prove the safe decision making of the vehicle.
A promising method to overcome this matter is the scenario-based approach, focused on the critical situations represented by a significant sample of harmonized scenarios. Since confronting conventional physical driving tests with this test effort is not feasible anymore, virtualization of testing methods by means of computer simulation must be adopted. To supply a future certification process of automated driving systems, TÜV SÜD is developing a methodology for a scenario-based evaluation of AD systems that combines a virtual-based approach and physical testing while guaranteeing repeatability of test conditions. Physical testing provides real-world data used for parametrization and validation of the simulation models. In this presentation, these models will be introduced as well as the overall architecture of the simulation toolchain, which is strongly based in MATLAB® and Simulink®. Other automated, driving-related tools from MathWorks are utilized as well. The workflow within this testing methodology for a specific ODD will be demonstrated.
Develop Planning and Controls for Highway Lane Change Maneuvers
Marco Roggero, MathWorks
An automated lane change maneuver (LCM) system enables a vehicle to automatically move from one lane to another lane. The LCM system identifies objects surrounding the vehicle, plans an optimal trajectory that avoids these objects, and steers the ego vehicle along this trajectory. In this session, you will learn how you can use MATLAB® and Simulink® to:
Model the planning and controls components
Model scenarios and vehicle dynamics to test components
Simulate and assess behavior with traffic on straight and curved roads
Lane Change Assist Development with Simulink
Thaddäus Menzel, IDIADA Fahrzeugtechnik
IDIADA Fahrzeugtechnik GmbH, the German Business Unit of Applus+ IDIADA, is an engineering company that provides design, testing, engineering, and homologation services to the automotive industry. We are interested in the verification and validation of advanced driver assistance systems. To optimize and validate our processes and testing capabilities, we need ADAS, whose advantages and disadvantages are known to us.
Instead of starting from scratch and to save time, we used Automated Driving Toolbox™ and Simulink®. The default examples like ACC and LKA, with the included scenario reader, sensors, multi-object tracker, and vehicle and driver models, are a good introduction to ADAS. These parts were the basis for the lane change assist. There were some challenges on the way, such as reading lanes behind the ego vehicle, sensor fusion of lanes and objects, sensor fusion of objects behind and in front of the ego vehicle, and trajectory planning and modification in real time.
As a result, we got a lane change assist, which detects faster objects on the target lane coming from behind or slower objects ahead, waits until the object has passed, and plans the trajectory for the lane change. The trajectory was realized by two clothoid curves, which are curves with linear change in curvature and used in road design. Additionally, this LCA was built modularly by using Simulink subsystems with different sensor configurations. To verify the LCA, we automatically generated code for different scenarios with different parameters, like delta speed and distance. The Driving Scenario Designer app was the basis for the automated scenario generation. We want to implement this and other ADAS on our driving simulator DiM 250 and on the IDIADA ADAS platform tool (IDAPT) in real cars, like our CAV (level 4 taxi), to test it on our proving ground.
Toolchain Definition and Integration for ISO 26262-Compliant Development
Lars Rosqvist, MathWorks
Simulink® and Stateflow® are used extensively for ISO 26262–compliant embedded software development, from ASIL-A through ASIL-D. The algorithmic needs of advanced driver assistance and autonomous driving applications are often expressed more naturally in MATLAB®, however. In this session, Lars discusses the challenges and best practices for achieving ISO 26262 compliance in a mixed MATLAB and Simulink paradigm. Examples include applying verification and validation tools to software components authored primarily in MATLAB and integrating Simulink with collaboration tools such as Git™ and Gerrit Code Review.
Model-Based Engineering for Cybersecurity: Preparing for UNECE Regulation and ISO/SAE-21434
Stefan David, MathWorks
Cybersecurity is an increasingly important topic with the rise of connected cars and the implementation of over-the-air updates. If attackers gain access to individual cars or even whole fleets, the safety of passengers or the environment may be at risk in addition to the obvious business risks for car manufacturers.
UNECE and ISO/SAE 21434 “Cybersecurity Engineering for Road Vehicles,” which will be published in 2020, are governmental and legislative approaches to provide guidance for the automotive industry to address cybersecurity challenges and to mitigate those risks.
In this presentation, we will help you to prepare for the implementation of the standard and provide practical insights for cybersecurity-aware development of automotive applications. You will learn how to assess models and source code against Cert-C or CWE compliance, how to test applications against certain cyber-attacks in simulation, and techniques to detect them.
Automated Verification of Automotive Infotainment
Alexandra Tran, BMW
Conventionally, verification of the instrument cluster (IC) is reliant upon human visual perception, which is prone to error. Accordingly, assessing the accuracy of Assisted Driving View (ADV) is improved through the application of computer vision algorithms. ADV depicts up to five surrounding vehicles, each identified as either a car, truck, or motorbike.
For an ADV scenario, the test output is compared against the ground truth. An external camera records video footage of each ADV scene on an IC interface. A machine learning model identifies the positions and types of vehicles depicted. Subsequently, the collected data is compared, and discrepancies are automatically reported.
The video frames are calibrated using frame registration techniques. The ground truth objects are labeled consecutively. As a result, training data is acquired for the development of a motion-based, multi-object detector.
The machine learning model can validate the accuracy of ADV in a new software version compared to a verified standard version. Moreover, the accuracy of ADV can be assessed from real-world driving in varied weather and lighting conditions. The research methodology provides effective end-to-end testing of ADV.
Tackling Fleet Test Data with MATLAB
Sebastian Bomberg, MathWorks
Do you have a strategy to analyze the data from your connected test vehicle fleet? How fast are you able to develop and apply analytics on huge sets of data to find desired events or find trends that were previously unknown? Are you able to work with all of your data instead of a subset?
In this talk, Sebastian Bomberg demonstrates how to implement a workflow with MATLAB® that addresses these issues. Topics include:
Exploring the types of questions you can ask of your fleet data
Preparing your data for efficient analytics
Developing analytics that execute on a “per unit” or “across all” basis
Deploying analytics to keep up with the continuous intake of test data
Accelerating Deployment of Autonomous Delivery Robots Using Model-Based Design
Erik Wilhelm, KYBURZ
KYBURZ Switzerland is an OEM of electric vehicles for the last mile delivery market. Based on customer requests, we began developing automated delivery systems in 2017. We have experience in electric drive integration and vehicle design. Based on aggressive project deadlines and the goal to follow best practices in functional safety for embedded design, we used Model-Based Design with substantial success. In a short period, we delivered four prototype vehicles that have been used to validate business cases for our customers.
We will describe how we were able to meet our challenging technical goals on time using Model-Based Design, including an innovative approach using Simulink PLC Coder™ to achieve SIL2 performance on our embedded controllers.
Advanced Capabilities for Embedding Machine Learning into ECUs
Christoph Stockhammer, MathWorks
Machine learning is a hot topic in the automotive industry. Deploying machine learning algorithms to electronic control units (ECUs) is often a bottleneck because of the memory, CPU throughput, and software development and integration techniques required to support machine learning algorithms.
In this presentation, Christoph Stockhammer provides an overview of machine learning technologies and deployment workflows for embedded processors. He will also discuss advanced capabilities that are of interest for automotive and adjacent industries, including in-place modification support, Simulink® support, and fixed-point conversion.
Making MATLAB Data Analytics Accessible Across the Enterprise
Anders Sollander, MathWorks
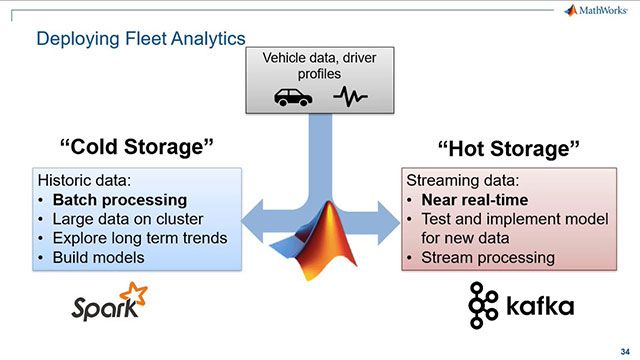
MATLAB® has scaled up to support cluster and cloud-based data and computing frameworks. In the meantime, data and computing framework technologies continue to evolve rapidly. In this presentation, Anders Sollander provides an example of how an enterprise customer integrated MATLAB with their existing framework. The integration enables engineers to slice and dice very large datasets using Apache Spark™ and extract forensic slices to develop analytics that can then be pushed down to execute at scale on the cluster. The integration with MATLAB also supports workflows that conform to enterprise-level security, governance, and access controls requirements while enabling users to make the results of their analytics easily accessible across the organization.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.