dubinsPathSegment
Dubins path segment connecting two poses
Description
The dubinsPathSegment object holds information for a Dubins path
segment that connects two poses as a sequence of three motions. The motion options
are:
Straight
Left turn at maximum steer
Right turn at maximum steer
Creation
To generate a dubinsPathSegment object, use the connect function
with a dubinsConnection
object:
dubPathSeg = connect(connectionObj,start,goal)
To specifically define a path segment:
dubPathSeg = dubinsPathSegment(connectionObj,start,goal,motionLengths,motionTypes)
Properties
Object Functions
interpolate | Interpolate poses along path segment |
show | Visualize path segment |
Examples
Create a dubinsConnection object.
dubConnObj = dubinsConnection;
Define start and goal poses as [x y theta] vectors.
startPose = [0 0 0]; goalPose = [1 1 pi];
Calculate a valid path segment to connect the poses.
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
Show the generated path.
show(pathSegObj{1})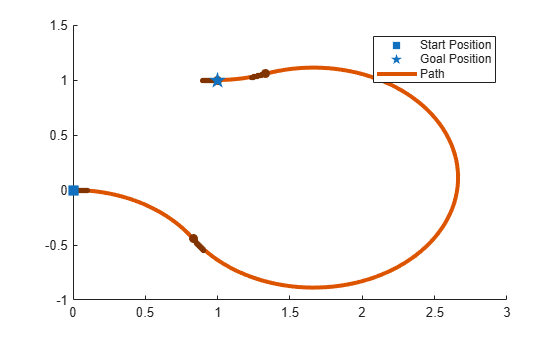
Extended Capabilities
Version History
Introduced in R2019b