Pure Pursuit Controller
Pure pursuit is a path tracking algorithm. It computes the curvature command that moves the
robot from its current position to reach some look-ahead point in front of the robot. The
linear velocity is assumed constant, hence you can change the linear velocity of the robot
at any point. The algorithm then moves the look-ahead point on the path based on the current
position of the robot until the last point of the path. You can think of this as the robot
constantly chasing a point in front of it. The property
LookAheadDistance decides how far the look-ahead point is
placed.
The controllerPurePursuit object
is not a traditional controller, but acts as a tracking algorithm for path following
purposes. Your controller is unique to a specified a list of waypoints. The desired linear
velocity and maximum curvature can be specified. These properties are determined based on
the vehicle specifications. Given the pose (position and orientation) of the vehicle as an
input, the object can be used to calculate the linear velocity and curvature commands for
the robot. How the robot uses these commands is dependent on the system you are using, so
consider how robots can execute a motion given these commands. The final important property
is the LookAheadDistance, which tells the robot how far along on the path
to track towards. This property is explained in more detail in a section below.
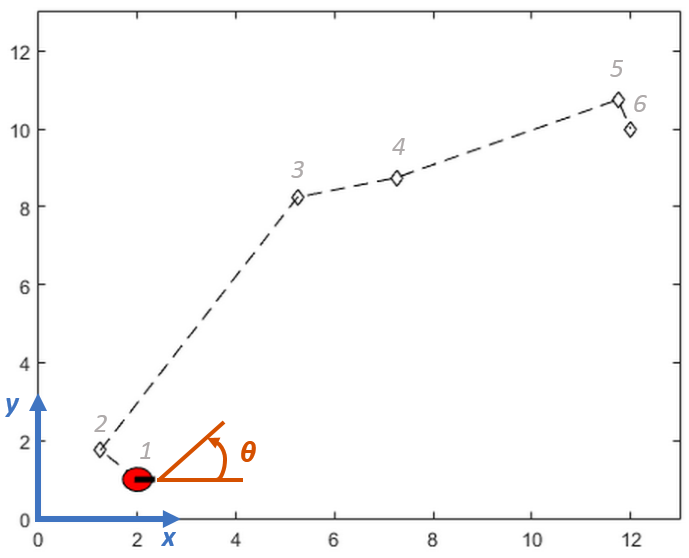
Reference Coordinate System
It is important to understand the reference coordinate frame used by the pure pursuit
algorithm for its inputs and outputs. The figure below shows the reference coordinate
system. The input waypoints are [x y] coordinates, which are used to
compute the robot linear velocity and curvature commands. The pose of the robot is
composed of an xy-position and angle in the form [x y
theta]. The positive x and y
directions are in the right and up directions respectively (blue in figure). The
theta value is the angular orientation of the robot measured
counterclockwise in radians from the x-axis (robot currently at
0 radians).
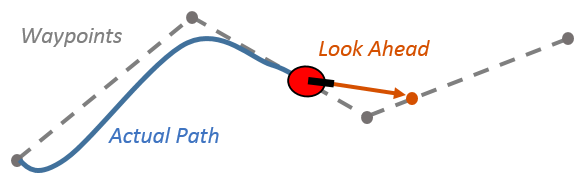
Look Ahead Distance
The LookAheadDistance property is the main tuning property for the
controller. The look ahead distance is how far along the path the robot should look from
the current location to compute the curvature commands. The figure below shows the robot
and the look-ahead point. As displayed in this image, note that the actual path does not
match the direct line between waypoints.
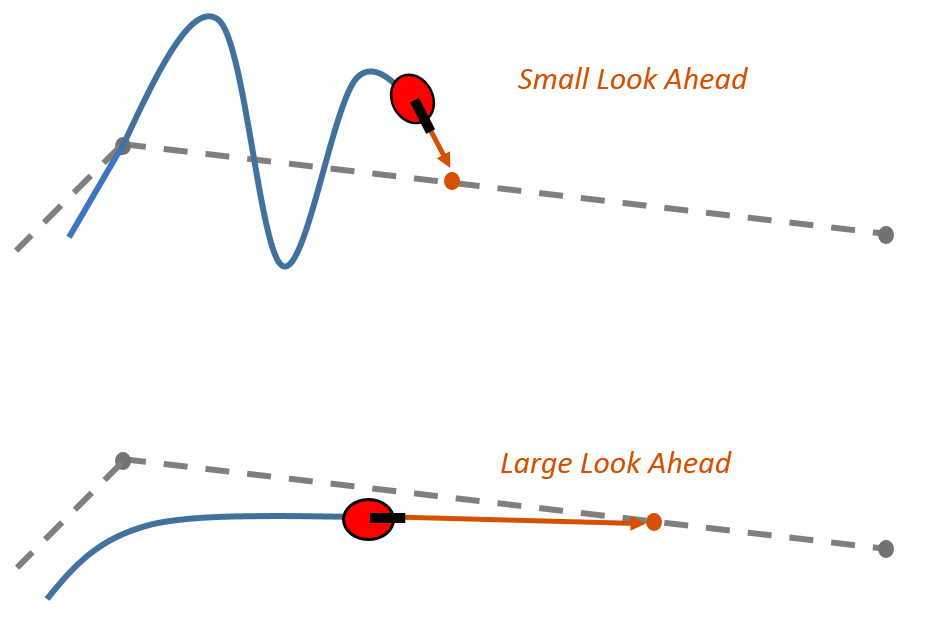
The effect of changing this parameter can change how your robot
tracks the path and there are two major goals: regaining the path
and maintaining the path. In order to quickly regain the path between
waypoints, a small LookAheadDistance will cause
your robot to move quickly towards the path. However, as can be seen
in the figure below, the robot overshoots the path and oscillates
along the desired path. In order to reduce the oscillations along
the path, a larger look ahead distance can be chosen, however, it
might result in larger curvatures near the corners.
The LookAheadDistance property should be tuned for your application and
robot system. Different linear velocities and curvatures will affect this response as
well and should be considered for the path following controller.
Limitations
There are a few limitations to note about this pure pursuit algorithm:
As shown above, the controller cannot exactly follow direct paths between waypoints. Parameters must be tuned to optimize the performance and to converge to the path over time.
This pure pursuit algorithm does not stabilize the robot at a point. In your application, a distance threshold for a goal location should be applied to stop the robot near the desired goal.
References
[1] Coulter, R. Implementation of the Pure Pursuit Path Tracking Algorithm. Carnegie Mellon University, Pittsburgh, Pennsylvania, Jan 1990.