Create a Simple Model
You can use Simulink® to model a system and then simulate the dynamic behavior of that system. The basic techniques you use to create a simple model in this tutorial are the same as those you use for more complex models. This example simulates simplified motion of a car. A car is typically in motion while the gas pedal is pressed. After the pedal is released, the car idles and comes to a stop.
A Simulink block is a model element that defines a mathematical relationship between its input and output. To create this simple model, you need four Simulink blocks.
| Block Name | Block Purpose | Model Purpose |
|---|---|---|
| Pulse Generator | Generate an input signal for the model | Represent the accelerator pedal |
| Gain | Multiply the input signal by a constant value | Calculate how pressing the accelerator affects the car acceleration |
| Second-Order Integrator | Integrate the input signal twice | Obtain position from acceleration |
| Outport | Designate a signal as an output from the model | Designate the position as an output from the model |
Simulating this model integrates a brief pulse twice to get a ramp. The results display in a Scope window. The input pulse represents a press of the gas pedal — 1 when the pedal is pressed and 0 when it is not. The output ramp is the increasing distance from the starting point.
Open New Model
Use the Simulink Editor to build your models.
Start MATLAB®. From the MATLAB toolstrip, click Simulink
 .
.
Click the Blank Model template.
The Simulink Editor opens.
To avoid shadowing, the Simulink Editor checks loaded models and files on the path and creates a model with the next available name
untitled,untitled1,untitled2, and so on.
From the Simulation tab, select Save > Save as. In the File name text box, enter a name for your model. For example,
simple_model. Click Save. The model is saved with the file extension.slx.
Open Simulink Library Browser
Simulink provides a set of block libraries, organized by functionality in the Library Browser. The following libraries are common to most workflows:
Continuous — Blocks for systems with continuous states
Discrete — Blocks for systems with discrete states
Math Operations — Blocks that implement algebraic and logical equations
Sinks — Blocks that store and show the signals that connect to them
Sources — Blocks that generate the signal values that drive the model
To open the Library Browser, in the Simulink Toolstrip, on the Simulation tab, click Library Browser.

To browse through the block libraries, in the library tree, expand a category and then a functional area.
To search all of the available block libraries, enter a search term.
For example, find the Pulse Generator block. In the search box,
enter pulse, then press Enter. The software
searches the libraries for blocks with pulse in their name or
description and then displays the blocks on the Search Results
tab of the Library Browser.
Tip
You can return to browsing the library tree by clicking the Library Tab.

Get detailed information about a block. On the Search Results tab, right-click the Pulse Generator block, then select Help for the Pulse Generator block. The Help browser opens and displays the reference page for the block.
Blocks typically have several parameters. You can access all block parameters by double-clicking the block.
Add Blocks to Model
To start building the model, add blocks to the model canvas. You can add blocks using the Library Browser or the quick insert menu.
Start by adding a Pulse Generator block from the Library Browser.
From the Sources library, drag the Pulse Generator block to the Simulink Editor. A copy of the Pulse Generator block appears in your model with a text box for the value of the Amplitude parameter. Enter
1.
Parameter values persist throughout the simulation.
Add a Gain block using the quick insert menu.
Double-click anywhere in the model canvas. In the quick insert menu that appears, enter
out. A list of blocks appears. For each block in the list, the name of the library that contains the block is displayed underneath the block name. Select the Out1 block stored in the Simulink library by pressing Enter.
For more information about the quick insert menu, see Add Blocks to Models Using Quick Insert Menu.
Add these blocks to the model using the Library Browser or the quick insert menu.
Block Library Parameter Gain Simulink/Math Operations Gain:
2Second-Order Integrator Simulink/Continuous Initial condition:
0Add a second Outport block by copying the existing one and pasting it at another point using keyboard shortcuts.
Your model now has the blocks you need.
Arrange the blocks by clicking and dragging each block. To resize a block, drag a corner of the block.

Connect Blocks
Connect the blocks by creating lines between output ports and input ports.
Click the output port on the right side of the Pulse Generator block.
The output port and all input ports suitable for a connection are indicated by a blue chevron symbol
 .
. 
Point to
to see the connection cue.
Click the cue to connect the blocks with a line and an arrow that indicates the direction of signal flow.

Connect the output port of the Gain block to the input port on the Second-Order Integrator block.
Connect the two outputs of the Second-Order Integrator block to the two Outport blocks.
Save your model. In the Simulation tab, click Save.

Add Signal Viewer
To view simulation results, connect the first output to a Signal Viewer.
Click the signal. In the Simulation tab under Prepare, click Add Viewer. Select Scope. A viewer icon appears on the signal and a scope window opens.

You can open the scope at any time by double-clicking the icon.
Run Simulation
Specify the stop time for the simulation. Then, simulate the model.
On the Simulation tab, set the simulation stop time. In the Simulink Toolstrip, on the Simulation tab, enter the value in the Stop Time field.

The default stop time of
10.0is appropriate for this model. This time value has no units. The time unit in Simulink depends on how the equations are constructed. This example simulates the simplified motion of a car for 10 seconds — other models could have time units in milliseconds or years.To run the simulation, click Run
 .
.
The simulation runs and produces the output in the scope viewer.

Refine Model
Change Block Parameters
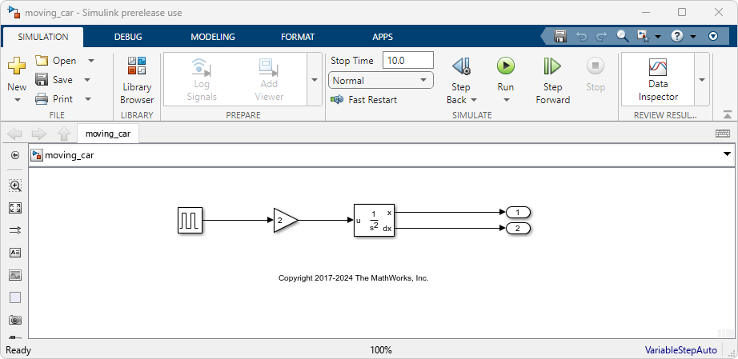
This example takes an existing model, moving_car.slx, and models a proximity sensor based on this motion model.
In this scenario, a digital sensor measures the distance between the car and an obstacle 10 m (30 ft) away. The model outputs the sensor measurement and the position of the car, taking these conditions into consideration:
The car comes to a hard stop when it reaches the obstacle.
In the physical world, a sensor measures the distance imprecisely, causing random numerical errors.
A digital sensor operates at fixed time intervals.
To start, open the moving_car model. At the MATLAB command line, enter:
open_system('moving_car.slx');You first need to model the hard stop when the car position reaches 10 . The Integrator, Second-Order block has a parameter for that purpose.
Double-click the Integrator, Second-Order block. The Block Parameters dialog box appears.
Select Limit x and enter
10for Upper limit x. The background color for the parameter changes to indicate a modification that is not applied to the model. Click OK to apply the changes and close the dialog box.
Add New Blocks and Connections
Add a sensor that measures the distance from the obstacle.
Modify the model. Expand the model window to accommodate the new blocks as necessary.
Find the actual distance. To find the distance between the obstacle position and the vehicle position, add the Subtract block from the
Math Operationslibrary. Also add the Constant block from theSourceslibrary to set the constant value of10for the position of the obstacle.Model the imperfect measurement that would be typical to a real sensor. Generate noise by using the Band-Limited White Noise block from the
Sourceslibrary. Set the Noise power parameter to0.001. Add the noise to the measurement by using an Add block from theMath Operationslibrary.Model a digital sensor that fires every 0.1 seconds. In Simulink, sampling of a signal at a given interval requires a sample and hold. Add the Zero-Order Hold block from the
Discretelibrary. After you add the block to the model, change the Sample Time parameter to0.1.Add another Outport to connect to the sensor output. Keep the default value of the Port number parameter.
Connect the new blocks. The output of the Second-Order Integrator block is already connected to another port. To create a branch in that signal, left-click the signal to highlight potential ports for connection, and click the appropriate port.

Annotate Signals
Add signal names to the model.
Double-click the signal and type the signal name.

To finish, click away from the text box.
Repeat these steps to add the names as shown.

Compare Multiple Signals
Compare the actual distance signal with the
measured distance signal.
Create and connect a Scope Viewer to the
actual distancesignal. Right-click the signal and select Create & Connect Viewer > Simulink > Scope. The name of the signal appears in the viewer title.Add the
measured distancesignal to the same viewer. Right-click the signal and select Connect to Viewer > Scope1. Make sure that you are connecting to the viewer you created in the previous step.
Simulate the model. The scope viewer shows the two signals,
actual distancein yellow andmeasured distancein blue.
Zoom into the graph to observe the effect of noise and sampling. Click Zoom
 . Left-click and drag a box around the
region you want to see more closely.
. Left-click and drag a box around the
region you want to see more closely.
You can repeat this action as needed to observe the details.

The plot shows that the measurement can deviate from the actual value by as much as 0.3 m. This information becomes useful when designing safety features, such as a collision warning.
See Also
Blocks
- Pulse Generator | Gain | Second-Order Integrator | Add | Constant | Zero-Order Hold | Band-Limited White Noise
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)