NXT Ultrasonic Sensor
Measure distance between NXT ultrasonic sensor connected to EV3 brick and nearest object
Libraries:
Simulink Support Package for LEGO MINDSTORMS EV3 Hardware /
NXT Sensors
Description
Add-On Required: This feature requires the Simulink Support Package for LEGO MINDSTORMS EV3 Hardware add-on.
Use the NXT Ultrasonic Sensor block to measure the distance between the NXT ultrasonic sensor connected to the LEGO® MINDSTORMS® EV3 brick and the nearest object in front of the sensor. The sensor can detect objects from approximately 5 to 255 centimeters away. The block measures approximate distances from the object. For greater precision, calibrate the sensor output values against physical measurements.
The distance from which the sensor first detects an approaching object depends on these factors.
The ultrasonic reflectance of the object, which is a function of the object’s size and composition. The sensor detects large hard objects from a greater distance than small soft ones. For example, the sensor might detect a pane of glass at 255 cm and a hand puppet at 150 cm.
The angle of incidence of the object relative to the sensor. The sensor detects objects directly in front of it at greater distances than objects off to the sides.
During simulations without hardware, this block emits zeros. See Block Produces Zeros or Does Nothing in Simulation.
Examples
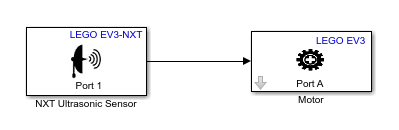
This example show how to measure distance between the NXT ultrasonic sensor connected to an EV3 brick and the nearest object.
Open the legoev3nxtlib block library and copy the NXT
Ultrasonic Sensor as described in Open Block Library for LEGO MINDSTORMS EV3 Hardware.
Open the legoev3lib block library and copy the Motor block to the same model and
connect the blocks.
Connect the ultrasonic sensor to port 1 and a servo motor to port A of the EV3 brick.
Prepare and run the model on the EV3 brick as described in Run Model on EV3 Hardware.
Hold the ultrasonic sensor closer to an object and observe that the speed of the motor decreases.
Ports
Output
Parameters
Version History
Introduced in R2012a
See Also
Open Block Library for LEGO MINDSTORMS EV3 Hardware | Motor | Run Model on EV3 Hardware