Velocity Control of Four-Phase PMSM with Open-End Winding
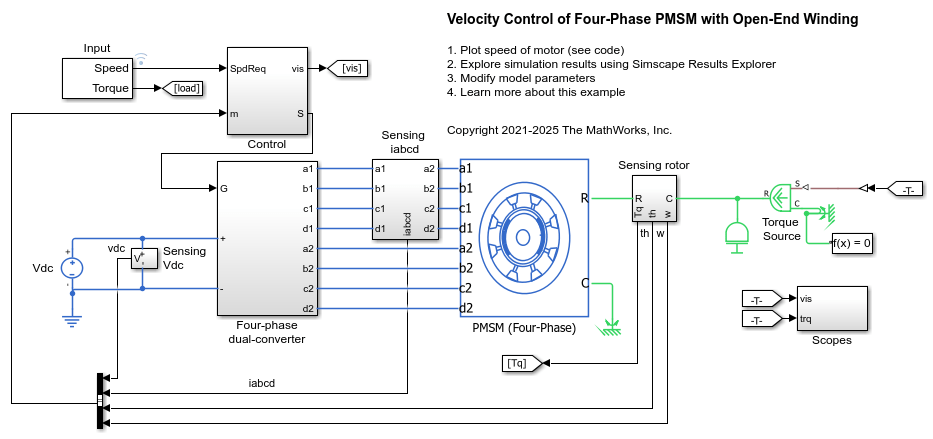
This example shows how to control the rotor angular velocity in an electrical-traction drive that uses a four-phase permanent magnet synchronous machine (PMSM) with an open-end winding. To view the source code of the Open-End PMSM (Four-Phase) block, double-click the block and then click the 'Source code' hyperlink in the Description tab. A DC voltage source feeds the PMSM through two controlled four-phase converters. The PMSM operates in both motoring and generating modes according to the load. An ideal torque source provides the load. The Scopes subsystem contains scopes that allow you to see the simulation results. The Control subsystem includes a PI-based cascade control structure that has an outer angular-velocity-control loop and four inner current-control loops. During the one second simulation, the angular velocity demand is 0 rpm, 500 rpm, 2000 rpm, and then 3000 rpm.
Model Overview
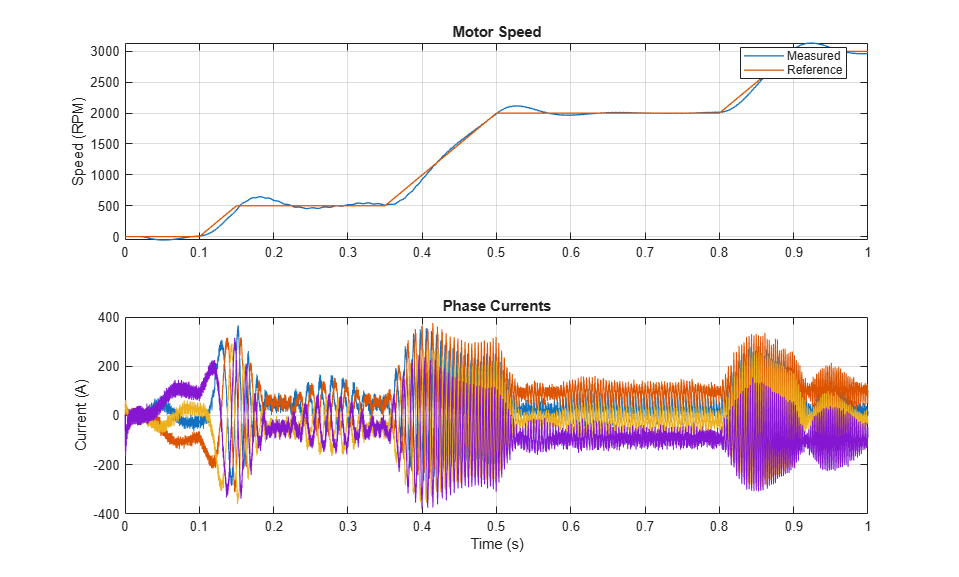
Simulation Results from Simscape Logging
This plot shows the requested and measured velocity for the test, as well as the phase currents in the electric drive.