Direct Torque Control with Space Vector Modulation of an Induction Motor Drive
This example demonstrates the speed regulation of a variable-frequency AC drive using the direct torque control (DTC) technique with space vector modulation.
Description
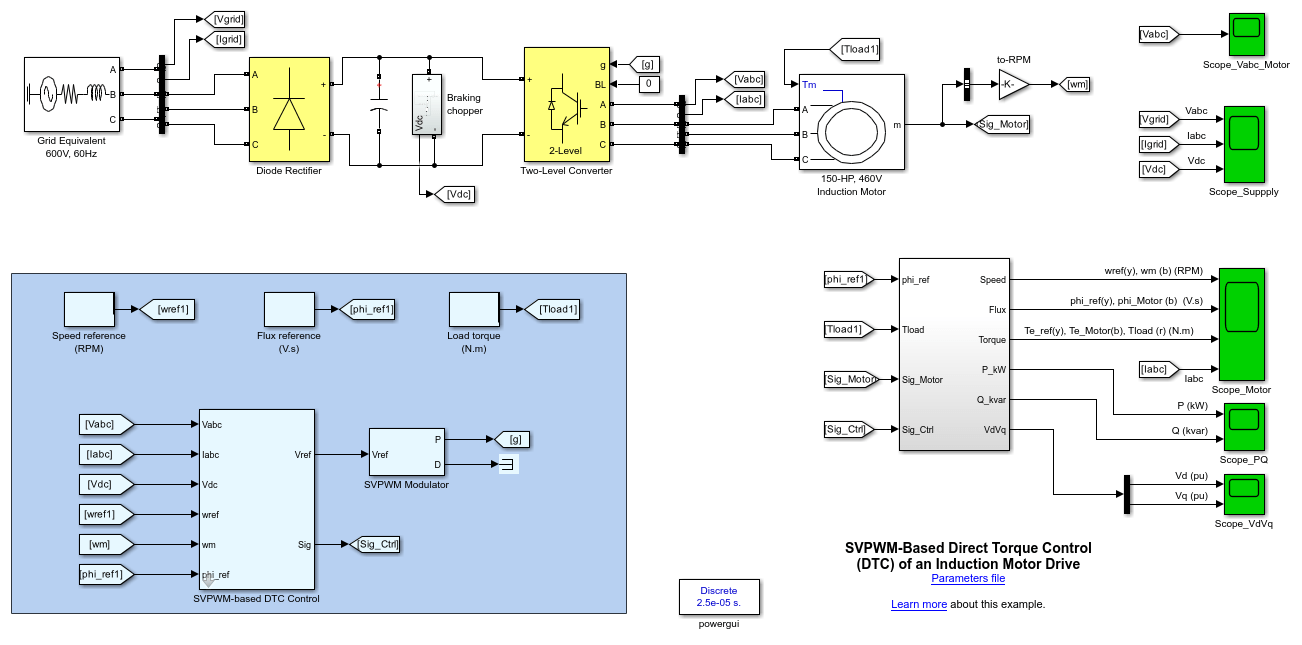
Electrical Model
The electrical energy is supplied by a three-phase AC/DC diode rectifier connected to a 600 V, 60 Hz grid equivalent. The DC bus is connected to a three-phase, two-level converter. This converter generates the variable voltage and frequency required for variable-speed operation of the 150 HP induction motor. In addition, a braking chopper is connected to the DC bus in order to dissipate the kinetic energy of the motor during deceleration.
An inverter-fed induction motor drive can be controlled through various techniques depending on the application, desired performance, and controller design complexity. Commonly used schemes are scalar control (V/Hz control or open loop flux control) or vector control (field-oriented control or direct torque control). In our example, we use the DTC technique with space vector pulse width modulation (SVPWM).
Compared to the classical hysteresis-based DTC, the SVPWM-DTC technique has a fixed switching frequency. Furthermore, this technique significantly reduces the motor torque ripple in steady-state operation. Refer to the Direct Torque Control of an Induction Motor Drive example to see the torque ripple of a motor drive using hysteresis-based DTC control.
SVPWM-Based DTC Controller
DTC is a control technique that allows you to instantaneously control the motor magnetic flux and its electromagnetic torque in a decoupled way. Controlling the torque directly permits accurate static and dynamic speed regulation.
The main components of the DTC subsystem are:
Flux and Torque Calculation - Stator flux linkage is estimated by integrating the stator voltages, and torque is calculated based on the estimated flux and the motor currents.
Speed Regulator - The regulator compares the actual motor speed with the speed reference and generates the torque reference.
Flux and torque regulators - The calculated flux magnitude and torque are compared with the reference values. The resulting flux and torque errors are fed to anti-windup PI regulators. The output of the flux regulator is the direct-axis reference voltage Vd_ref and the output of the torque regulator is the quadrature-axis reference voltage Vq_ref.
Scaling and transformation - Vd_ref and Vq_ref are scaled and transformed to a three-phase signal Vref using the rotating frame reference given by the flux position phi_pha.
The output Vref of the DTC subsystem is fed to a SVPWM modulator that generates pulses to the motor inverter.
Simulation
Run the simulation and observe waveforms on Scope_Motor. Initially, the flux reference is set to 0.9 V.s.
At 0.1 s, the speed reference is set to 1500 RPM and the motor starts to accelerate. You can see that the motor speed precisely follows the speed reference, whose maximum rate of change is limited to 1200 RPM/s. The 1500 RPM set point is reached at 1.35 s.
At 1.5 s, a load torque of 500 N.m is applied to the motor. The DTC control maintains the motor speed at 1500 RPM.
At 2 s, the load torque is reduced to 50 N.m and at 2.5s, the speed reference is reduced to 500 RPM. Observe on Scope Supply that the braking chopper operation dissipates the kinetic energy produced by the motor in order to avoid overvoltage on the DC bus.
At 3.5 s, the flux reference is increased from 0.9 to 1.0 V.s
Real-Time Simulation
If you have Simulink Real-Time and a Speedgoat target computer, you can run this model in real time.
Open the Configuration Parameters window (or press Ctrl+E ), click Code Generation, and set System target file to an STF for a Simulink Real-Time model.
Connect to the target and, in the Real-Time tab, click Run on Target.
Your model will then be automatically built, deployed, and executed on the target. Depending on your target streaming bandwidth, you may have to reduce the number of signals transferred in real-time from the target to the host computer.
References
Cirrincione, M., M. Pucci, G. Vitale. Power Converters and AC Electrical Drives with Linear Neural Networks. CRC Press, 2012.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)