comm.CPMModulator
Modulate signal using CPM method
Description
The comm.CPMModulator
System object™ modulates an input signal using the continuous phase modulation (CPM)
method. The output is a baseband representation of the modulated signal. For more
information about the modulation and filtering applied, see Algorithms.
To modulate a signal using the CPM method:
Create the
comm.CPMModulatorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
cpmmod = comm.CPMModulator creates a modulator
System object to modulate input signals using the CPM method.
cpmmod = comm.CPMModulator(
sets properties using one or more name-value arguments. For example,
Name=Value)comm.CPMModulator(SymbolMapping='Gray') configures the
object with gray-coded symbol ordering for the modulated symbols.
cpmmod = comm.CPMModulator(
sets the M,Name=Value)ModulationOrder
property to M and optional name-value arguments.
Properties
Usage
Syntax
Description
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create CPM modulator, and CPM demodulator System objects.
cpmmodulator = comm.CPMModulator(8, ... 'BitInput',true, ... 'SymbolMapping','Gray'); cpmdemodulator = comm.CPMDemodulator(8, ... 'BitOutput',true, ... 'SymbolMapping','Gray');
Create an error rate calculator System object™, that accounts for the delay caused by the Viterbi algorithm.
delay = log2(cpmdemodulator.ModulationOrder) ... * cpmdemodulator.TracebackDepth; errorRate = comm.ErrorRate('ReceiveDelay',delay);
Transmit 100 3-bit words and print the error rate results.
for counter = 1:100 data = randi([0 1],300,1); modSignal = cpmmodulator(data); noisySignal = awgn(modSignal,0); receivedData = cpmdemodulator(noisySignal); errorStats = errorRate(data,receivedData); end fprintf('Error rate = %f\nNumber of errors = %d\n', ... errorStats(1),errorStats(2))
Error rate = 0.004474 Number of errors = 134
Using the comm.CPMModulator and comm.CPMDemodulator System objects, apply Gaussian frequency-shift keying (GFSK) modulation and demodulation to random bit data.
Create a GFSK modulator and demodulator pair.
gfskMod = comm.CPMModulator( ... ModulationOrder=2, ... FrequencyPulse='Gaussian', ... BandwidthTimeProduct=0.5, ... ModulationIndex=1, ... BitInput=true); gfskDemod = comm.CPMDemodulator( ... ModulationOrder=2, ... FrequencyPulse='Gaussian', ... BandwidthTimeProduct=0.5, ... ModulationIndex=1, ... BitOutput=true);
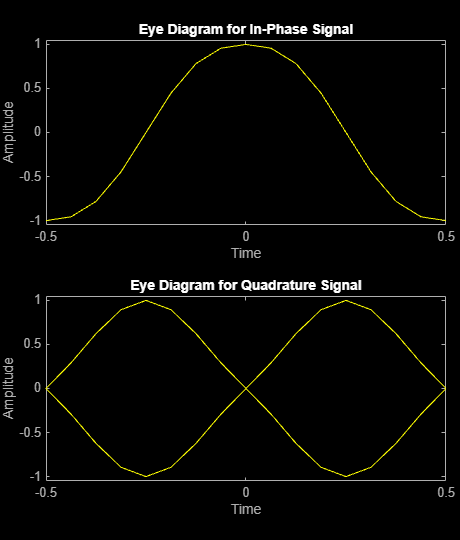
Generate random bit data and apply GFSK modulation. Plot the eye diagram of the modulated signal traces.
numSym = 100; x = randi([0 1],numSym*gfskMod.SamplesPerSymbol,1); y = gfskMod(x); eyediagram(y,16)
Demodulate the GFSK-modulated data. To verify that the demodulated signal data is equal to the original data, account for the delay introduced by the Gaussian filtering in the GFSK modulation and demodulation processes.
z = gfskDemod(y); delay = finddelay(x,z); isequal(x(1:end-delay),z(delay+1:end))
ans = logical
1
Plot the phase tree diagram for signals that have applied continuous phase modulation (CPM). A phase tree diagram superimposes many curves, each of which plots the phase of a modulated signal over time. The distinct curves result from different inputs to the modulator. This example defines settings for the CPM modulator, applies symbol mapping, and plots the results. Each curve represents a different instance of simulating the CPM modulator with a distinct (constant) input signal.
Define parameters for the example and create a CPM modulator System object™.
M = 2; % Modulation order modindex = 2/3; % Modulation index sps = 8; % Samples per symbol L = 5; % Symbols to display pmat = zeros(L*sps,M^L); % Empty phase matrix cpm = comm.CPMModulator(M, ... ModulationIndex=modindex, ... FrequencyPulse="Raised Cosine", ... PulseLength=2, ... SamplesPerSymbol=sps);
Use a for-loop to apply the mapping of the input symbol to the CPM symbols, mapping 0 to -(M-1), 1 to -(M-2), and so on. Populate the columns of the phase matrix with the unwrapped phase angle of the modulated symbols.
for ip_sig = 0:(M^L)-1 s = int2bit(ip_sig,L,1); s = 2*s + 1 - M; x = cpm(s); pmat(:,ip_sig+1) = unwrap(angle(x(:))); end pmat = pmat/(pi*modindex); t = (0:L*sps-1)'/sps;
Plot the CPM phase tree.
plot(t,pmat); title('CPM Phase Tree') xlabel('Samples') ylabel('Phase (radians)')

More About
Algorithms
References
[1] Anderson, John B., Tor Aulin, and Carl-Erik Sundberg. Digital Phase Modulation. New York: Plenum Press, 1986.
[2] Proakis, John G. Digital Communications. 5th ed. New York: McGraw Hill, 2007.