TuningGoal.Poles
Constraint on control system dynamics
Description
Use TuningGoal.Poles to constrain the closed-loop
dynamics of a control system or of specific feedback loops within the control system. You can use
this tuning goal for control system tuning with tuning commands, such as
systune or looptune. A TuningGoal.Poles goal can ensure a minimum decay rate or minimum damping of the poles
of the control system or loop. It can also eliminate fast dynamics in the tuned
system.
Creation
Syntax
Description
Req = TuningGoal.Poles(mindecay,mindamping,maxfreq)mindecay = 0,
mindamping = 0, or maxfreq = Inf
to skip any of the three constraints.
Req = TuningGoal.Poles(location,mindecay,mindamping,maxfreq)getSensitivity (Simulink Control Design) for information about
sensitivity functions.) Use this syntax to narrow the scope of the tuning goal to a particular
feedback loop.
If you want to constrain the poles of the system with one or more feedback loops opened,
set the Openings property. To limit the enforcement of this tuning goal to
poles having natural frequency within a specified frequency range, set the
Focus property. (See Properties.)
Input Arguments
Properties
Examples
Create a requirement that constrains the inner loop of the following control system to be stable and free of fast dynamics. Specify that the constraint is evaluated with the outer loop open.
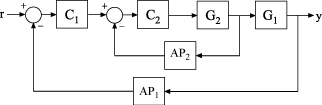
Create a model of the system. To do so, specify and connect the numeric plant models, G1 and G2, and the tunable controllers C1 and C2. Also, create and connect the AnalysisPoint blocks, AP1 and AP2, which mark points of interest for analysis and tuning.
G1 = tf(10,[1 10]); G2 = tf([1 2],[1 0.2 10]); C1 = tunablePID('C','pi'); C2 = tunableGain('G',1); AP1 = AnalysisPoint('AP1'); AP2 = AnalysisPoint('AP2'); T = feedback(G1*feedback(G2*C2,AP2)*C1,AP1);
Create a tuning requirement that constrains the dynamics of the closed-loop poles. Restrict the poles of the inner loop to the region , .
Req = TuningGoal.Poles(0.1,0,30);
Setting the minimum damping to zero imposes no constraint on the damping constants for the poles.
Specify that the constraint on the tuned system poles is applied with the outer loop open.
Req.Openings = 'AP1';When you tune T using this requirement, the constraint applies to the poles of the entire control system evaluated with the loop open at 'AP1'. In other words, the poles of the inner loop plus the poles of C1 and G1 are all considered.
After you tune T, you can use viewGoal to validate the tuned control system against the requirement.
Create a requirement that constrains the inner loop of the system of the previous example to be stable and free of fast dynamics. Specify that the constraint is evaluated with the outer loop open.
Create a tuning requirement that constrains the dynamics of the inner feedback loop, the loop identified by AP2. Restrict the poles of the inner loop to the region , .
Req = TuningGoal.Poles('AP2',0.1,0,30);Specify that the constraint on the tuned system poles is applied with the outer loop open.
Req.Openings = 'AP1';When you tune T using this requirement, the constraint applies only to the poles of the inner loop, evaluated with the outer loop open. In this case, since G1 and C1 do not contribute to the sensitivity function at AP2 when the outer loop is open, the requirement constrains only the poles of G2 and C2.
After you tune T, you can use viewGoal to validate the tuned control system against the requirement.
Tips
TuningGoal.Polesrestricts the closed-loop dynamics of the tuned control system. To constrain the dynamics or ensure the stability of a single tunable component, useTuningGoal.ControllerPoles.
Algorithms
When you tune a control system using a TuningGoal, the software converts
the tuning goal into a normalized scalar value f(x).
x is the vector of free (tunable) parameters in the control system. The
software then adjusts the parameter values to minimize
f(x), or to drive
f(x) below 1 if the tuning goal is a hard
constraint.
For TuningGoal.Poles,
f(x) reflects the relative satisfaction or violation of
the goal. For example, if you attempt to constrain the closed-loop poles of a feedback loop to a
minimum damping of ζ = 0.5, then:
f(x) = 1 means the smallest damping among the constrained poles is ζ = 0.5 exactly.
f(x) = 1.1 means the smallest damping ζ = 0.5/1.1 = 0.45, roughly 10% less than the target.
f(x) = 0.9 means the smallest damping ζ = 0.5/0.9 = 0.55, roughly 10% better than the target.
Version History
Introduced in R2012bSee Also
looptune | systune | looptune (for slTuner) (Simulink Control Design) | systune (for slTuner) (Simulink Control Design) | viewGoal | evalGoal | tunableTF | tunableSS | TuningGoal.ControllerPoles