Constructing and Working with Rational Splines
Rational Spline Example: Circle
For example,
circle = rsmak('circle');
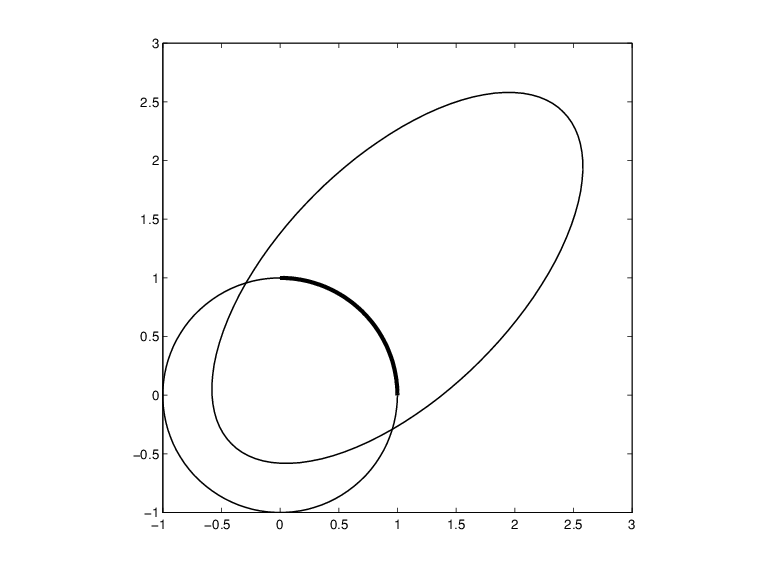
provides a rational spline whose values on its basic interval trace out the unit circle, i.e., the circle of radius 1 with center at the origin, as the command
fnplt(circle), axis square
readily shows; the resulting output is the circle in the figure A Circle and an Ellipse, Both Given by a Rational Spline.
It is easy to manipulate this circle to obtain related shapes. For example, the next commands stretch the circle into an ellipse, rotate the ellipse 45 degrees, and translate it by (1,1), and then plot it on top of the circle.
ellipse = fncmb(circle,[2 0;0 1]); s45 = 1/sqrt(2); rtellipse = fncmb(fncmb(ellipse, [s45 -s45;s45 s45]), [1;1] ); hold on, fnplt(rtellipse), hold off
As a further example, the "circle" just constructed is put together from four pieces. To highlight the first such piece, use the following commands:
quarter = fnbrk(fn2fm(circle,'rp'),1); hold on, fnplt(quarter,3), hold off
In the first command, fn2fm is used to change
forms, from one based on the B-form to one based on the ppform, and
then fnbrk is used to extract the first piece,
and this piece is then plotted on top of the circle in A Circle and an Ellipse, Both Given by a Rational Spline, with linewidth 3 to
make it stand out.
A Circle and an Ellipse, Both Given by a Rational Spline
Rational Spline Example: Sphere
As a surface example, the command rsmak('southcap') provides
a 3-vector valued rational bicubic polynomial whose values on the
unit square [-1 .. 1]^2 fill out a piece of the unit sphere. Adjoin to it five suitable rotates of it and you
get the unit sphere exactly. For illustration, the following commands
generate two-thirds of that sphere, as shown in Part of a Sphere Formed by Four Rotates of a Quartic Rational.
southcap = rsmak('southcap'); fnplt(southcap)
xpcap = fncmb(southcap,[0 0 -1;0 1 0;1 0 0]);
ypcap = fncmb(xpcap,[0 -1 0; 1 0 0; 0 0 1]);
northcap = fncmb(southcap,-1);
hold on, fnplt(xpcap), fnplt(ypcap), fnplt(northcap)
axis equal, shading interp, view(-115,10), axis off, hold off
Part of a Sphere Formed by Four Rotates of a Quartic Rational
Functions for Working With Rational Splines
Having chosen to represent the rational spline r =
s/w in this way by the ordinary spline R=[s;w] makes it is easy to apply to a rational spline all the
fn... commands in the Curve Fitting Toolbox™ spline functions, with the following exceptions. The integral of a
rational spline need not be a rational spline, hence there is no way to extend
fnint to rational splines. The derivative of a rational spline
is again a rational spline but one of roughly twice the order.
For that reason, fnder and fndir will not touch
rational splines. Instead, there is the command fntlr for computing
the value at a given x of all derivatives up to a given order of a
given function. If that function is rational, the needed calculation is based on the
considerations given in the preceding paragraph.
The command r = rsmak(shape) provides rational splines in rBform
that describe exactly certain standard geometric shapes , like
'circle', 'arc', 'cylinder',
'sphere', 'cone', 'torus'.
The command fncmb(r,trans) can be used to apply standard
transformations to the resulting shape. For example, if trans is a
column-vector of the right length, the shape would be translated by that vector while,
if trans is a suitable matrix like a rotation, the shape would be
transformed by that matrix.
The command r = rscvn(p) constructs the quadratic rBform of a
tangent-continuous curve made up of circular arcs and passing through the given
sequence, p, of points in the plane.
A special rational spline form, called a NURBS, has become a standard tool in CAGD. A NURBS is, by definition, any rational spline for which both s and w are in the same B-form, with each coefficient for s containing explicitly the corresponding coefficient for w as a factor:
The normalized coefficients a(:,i) for the
numerator spline are more readily used as control points than the unnormalized
coefficients
v(i)a(:,i)
used in the rBform. Nevertheless, this toolbox provides no special NURBS form, but only
the more general rational spline, but in both B-form (called rBform
internally) and in ppform (called rpform internally).
The rational spline circle used earlier is put together in
rsmak by code like the following.
x = [1 1 0 -1 -1 -1 0 1 1]; y = [0 1 1 1 0 -1 -1 -1 0]; s45 = 1/sqrt(2); w =[1 s45 1 s45 1 s45 1 s45 1]; circle = rsmak(augknt(0:4,3,2), [w.*x;w.*y;w]);
Note the appearance of the denominator spline as the last component. Also note how
the coefficients of the denominator spline appear here explicitly as factors of the
corresponding coefficients of the numerator spline. The normalized coefficient sequence
[x;y] is very simple; it consists of the vertices and midpoints,
in proper order, of the "unit square". The resulting control polygon is tangent to the circle at the places where the four
quadratic pieces that form the circle abut.
For a thorough discussion of NURBS, see [G. Farin, NURBS, 2nd ed., AKPeters Ltd, 1999] or [Les Piegl and Wayne Tiller, The NURBS Book, 2nd ed., Springer-Verlag, 1997].