filter
Forward recursion of state-space models
Description
filter computes state-distribution moments for each
period of the specified response data by recursively applying the Kalman
filter.
To compute updated state-distribution moments efficiently during only the final period
of the specified response data by applying one recursion of the Kalman filter, use
update
instead.
X = filter(Mdl,Y)X)
from performing forward recursion of the fully specified state-space model Mdl.
That is, filter applies the standard Kalman filter using Mdl and
the observed responses Y.
X = filter(Mdl,Y,Name,Value)Name,Value
arguments. For example, specify the regression coefficients and predictor data to
deflate the observations, or specify to use the square-root filter.
If Mdl is not fully specified, then you must specify the unknown parameters
as known scalars using the
'Params'
Name,Value argument.
[ uses any of the input arguments
in the previous syntaxes to additionally return the loglikelihood
value (X,logL,Output]
= filter(___)logL) and an output structure array (Output)
using any of the input arguments in the previous syntaxes. Output contains:
Filtered and forecasted states
Estimated covariance matrices of the filtered and forecasted states
Loglikelihood value
Forecasted observations and its estimated covariance matrix
Adjusted Kalman gain
Vector indicating which data the software used to filter
Examples
Suppose that a latent process is an AR(1). The state equation is
where is Gaussian with mean 0 and standard deviation 1.
Generate a random series of 100 observations from , assuming that the series starts at 1.5.
T = 100; ARMdl = arima('AR',0.5,'Constant',0,'Variance',1); x0 = 1.5; rng(1); % For reproducibility x = simulate(ARMdl,T,'Y0',x0);
Suppose further that the latent process is subject to additive measurement error. The observation equation is
where is Gaussian with mean 0 and standard deviation 0.75. Together, the latent process and observation equations compose a state-space model.
Use the random latent state process (x) and the observation equation to generate observations.
y = x + 0.75*randn(T,1);
Specify the four coefficient matrices.
A = 0.5; B = 1; C = 1; D = 0.75;
Specify the state-space model using the coefficient matrices.
Mdl = ssm(A,B,C,D)
Mdl =
State-space model type: ssm
State vector length: 1
Observation vector length: 1
State disturbance vector length: 1
Observation innovation vector length: 1
Sample size supported by model: Unlimited
State variables: x1, x2,...
State disturbances: u1, u2,...
Observation series: y1, y2,...
Observation innovations: e1, e2,...
State equation:
x1(t) = (0.50)x1(t-1) + u1(t)
Observation equation:
y1(t) = x1(t) + (0.75)e1(t)
Initial state distribution:
Initial state means
x1
0
Initial state covariance matrix
x1
x1 1.33
State types
x1
Stationary
Mdl is an ssm model. Verify that the model is correctly specified using the display in the Command Window. The software infers that the state process is stationary. Subsequently, the software sets the initial state mean and covariance to the mean and variance of the stationary distribution of an AR(1) model.
Filter states for periods 1 through 100. Plot the true state values and the filtered state estimates.
filteredX = filter(Mdl,y); figure plot(1:T,x,'-k',1:T,filteredX,':r','LineWidth',2) title({'State Values'}) xlabel('Period') ylabel('State') legend({'True state values','Filtered state values'})
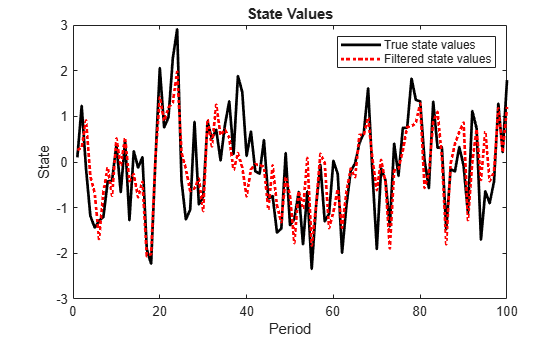
The true values and filter estimates are approximately the same.
Suppose that the linear relationship between the change in the unemployment rate and the nominal gross national product (nGNP) growth rate is of interest. Suppose further that the first difference of the unemployment rate is an ARMA(1,1) series. Symbolically, and in state-space form, the model is
where:
is the change in the unemployment rate at time t.
is a dummy state for the MA(1) effect.
is the observed change in the unemployment rate being deflated by the growth rate of nGNP ().
is the Gaussian series of state disturbances having mean 0 and standard deviation 1.
is the Gaussian series of observation innovations having mean 0 and standard deviation .
Load the Nelson-Plosser data set, which contains the unemployment rate and nGNP series, among other things.
load Data_NelsonPlosserPreprocess the data by taking the natural logarithm of the nGNP series, and the first difference of each series. Also, remove the starting NaN values from each series.
isNaN = any(ismissing(DataTable),2); % Flag periods containing NaNs gnpn = DataTable.GNPN(~isNaN); u = DataTable.UR(~isNaN); T = size(gnpn,1); % Sample size Z = [ones(T-1,1) diff(log(gnpn))]; y = diff(u);
Though this example removes missing values, the software can accommodate series containing missing values in the Kalman filter framework.
Specify the coefficient matrices.
A = [NaN NaN; 0 0]; B = [1; 1]; C = [1 0]; D = NaN;
Specify the state-space model using ssm.
Mdl = ssm(A,B,C,D);
Estimate the model parameters, and use a random set of initial parameter values for optimization. Specify the regression component and its initial value for optimization using the 'Predictors' and 'Beta0' name-value pair arguments, respectively. Restrict the estimate of to all positive, real numbers.
params0 = [0.3 0.2 0.2]; [EstMdl,estParams] = estimate(Mdl,y,params0,'Predictors',Z,... 'Beta0',[0.1 0.2],'lb',[-Inf,-Inf,0,-Inf,-Inf]);
Method: Maximum likelihood (fmincon)
Sample size: 61
Logarithmic likelihood: -99.7245
Akaike info criterion: 209.449
Bayesian info criterion: 220.003
| Coeff Std Err t Stat Prob
----------------------------------------------------------
c(1) | -0.34098 0.29608 -1.15164 0.24948
c(2) | 1.05003 0.41377 2.53771 0.01116
c(3) | 0.48592 0.36790 1.32079 0.18657
y <- z(1) | 1.36121 0.22338 6.09358 0
y <- z(2) | -24.46711 1.60018 -15.29024 0
|
| Final State Std Dev t Stat Prob
x(1) | 1.01264 0.44690 2.26592 0.02346
x(2) | 0.77718 0.58917 1.31912 0.18713
EstMdl is an ssm model, and you can access its properties using dot notation.
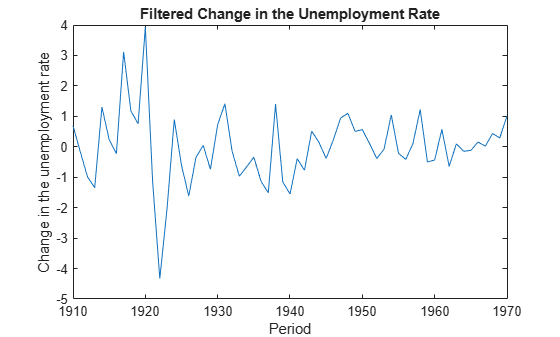
Filter the estimated state-space model. EstMdl does not store the data or the regression coefficients, so you must pass in them in using the name-value pair arguments 'Predictors' and 'Beta', respectively. Plot the estimated, filtered states. Recall that the first state is the change in the unemployment rate, and the second state helps build the first.
filteredX = filter(EstMdl,y,'Predictors',Z,'Beta',estParams(end-1:end)); figure plot(dates(end-(T-1)+1:end),filteredX(:,1)); xlabel('Period') ylabel('Change in the unemployment rate') title('Filtered Change in the Unemployment Rate')
Consider nowcasting the model in Filter States of Time-Invariant State-Space Model.
Generate a random series of 100 observations from .
T = 100;
A = 0.5;
B = 1;
C = 1;
D = 0.75;
Mdl = ssm(A,B,C,D);
rng(1); % For reproducibility
y = simulate(Mdl,T);Suppose the final 10 observations are in the forecast horizon.
fh = 10; yf = y((end-fh+1):end); % Holdout sample responses y = y(1:end-fh); % In-sample responses
Filter the observations through the model to obtain filtered states for each period.
[xhat,logL,output] = filter(Mdl,y); xhatvar = output.FilteredStatesCov;
xhat and xhatvar are 90-by-1 vectors of in-sample filtered states and corresponding variances, respectively. xhat(t) is the estimate of , and xhatvar is the estimate of .
Call filter again, but specify the real-time update option.
[xhatRT,logLRT,outputRT] = filter(Mdl,y,'RealTimeUpdate',true);
xhatRTvar = outputRT.FilteredStatesCov;xhatRT and xhatRTvar are scalars representing the estimate of and its corresponding variance, respectively.
Compare the filtered states and variances of period 90.
tol = 1e-10; areMeansEqual = (xhat(end) - xhatRT) < tol
areMeansEqual = logical
1
areVarsEqual = (xhatvar(end) - xhatRTvar) < tol
areVarsEqual = logical
0
areLogLsEqual = (logL - logLRT) < tol;
In the last period, the filtered states, their variances, and the loglikelihoods are equal.
Nowcast the model into the forecast horizon by performing this procedure for each successive period:
Set the initial state and its variance to their current filter estimates. This action changes the state-space model.
As an observation becomes available, filter it through the model in real time.
% Initialize state and variance state0 = xhatRT; var0 = xhatRTvar; % Preallocate xhatRTF = zeros(fh,1); xhatRTvarF = zeros(fh,1); for j = 1:fh Mdl.Mean0 = state0; Mdl.Cov0 = var0; [xhatRTF(j),~,outputRT] = filter(Mdl,yf(j),'RealTimeUpdate',true); % Alternatively, use update xhatRTvarF(j) = outputRT.FilteredStatesCov; state0 = xhatRTF(j); var0 = xhatRTvarF(j); end
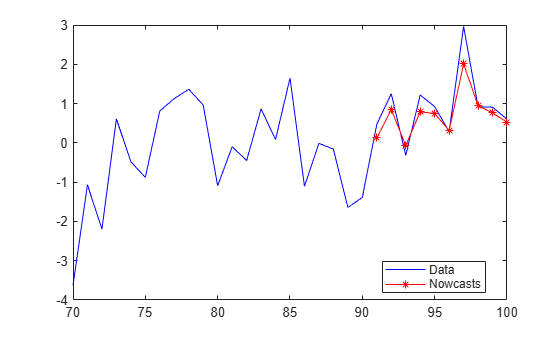
Plot the data and nowcasts.
figure plot((T-fh-20):T,[y(end-20:end); yf],'b-',(T-fh+1):T,xhatRTF,'r*-') legend(["Data" "Nowcasts"],'Location',"best")
Input Arguments
Name-Value Arguments
Output Arguments
Tips
Mdldoes not store the response data, predictor data, and the regression coefficients. Supply the data wherever necessary using the appropriate input or name-value arguments.To accelerate estimation for low-dimensional, time-invariant models, set
'Univariate',true. Using this specification, the software sequentially updates rather then updating all at once during the filtering process.
Algorithms
The Kalman filter accommodates missing data by not updating filtered state estimates corresponding to missing observations. In other words, suppose there is a missing observation at period t. Then, the state forecast for period t based on the previous t – 1 observations and filtered state for period t are equivalent.
For explicitly defined state-space models,
filterapplies all predictors to each response series. However, each response series has its own set of regression coefficients.
Alternative Functionality
To filter a standard state-space model in real time by performing one forward
recursion of the Kalman filter, call the update
function instead. Unlike filter, update
performs minimal input validation for computational efficiency.
References
Version History
Introduced in R2014a