Proportional and Servo-Valve Actuator
(To be removed) Continuous valve driver with output proportional to input signal
The Hydraulics (Isothermal) library will be removed in a future release. Use the Isothermal Liquid library instead.
For more information on updating your models, see Upgrading Hydraulic Models to Use Isothermal Liquid Blocks.
Library
Valve Actuators

Description
The Proportional and Servo-Valve Actuator block represents an electromagnetic actuator that is used in proportional and servo-valves to drive a spool or other working member. The block is intended to work with one of the directional valve models to form a desirable configuration of a proportional or servo-valve. The block is implemented as a data-sheet-based model and reproduces only the input/output relationship, or the actuator’s transient response, as presented in the catalog or data sheet.
The Proportional and Servo-Valve Actuator block is built using the blocks from the Simscape™ Physical Signals library. Both the input and the output of the block are physical signals. The block diagram of the model is shown in the following figure.
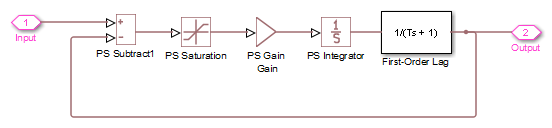
The model of the actuator is built of the Foundation Library Physical Signals blocks: PS Subtract, PS Saturation, PS Gain, PS Integrator. The first-order lag is arranged as a subsystem, as shown below,

and is also built of the Physical Signals blocks: PS Subtract, PS Gain, and PS Integrator. The transfer function of the lag is
where T is the Time constant of the lag. The value of this parameter is set through the parameter Gain of the PS Gain block in the First-Order Lag subsystem by setting it equal to 1/T.
The typical transient responses of a servo-valve or a high-quality proportional valve are shown in the following figure. The only difference between the two responses in the figure is the value of the saturation.

You can adjust the block parameters, such as saturation, gain, and time constant, to make the transient responses close enough to those provided in the data sheet. The most effective way to adjust the parameters is to use the Simulink Design Optimization software.
Note
This block is constructed out of blocks from the Simscape Physical Signals library (such as PS Add, PS Gain, and so on). Currently, the blocks in the Physical Signals library do not support unit propagation and checking. For more information, see How to Work with Physical Units.
Parameters
- Gain
Gain of the PS Gain block in the top level of the block diagram of the actuator model. The default value is
377.- Time constant
Time constant of the first-order lag. The Gain parameter of the PS Gain block in the First-Order Lag subsystem is equal to 1/Time constant. The default value is
0.002s.- Saturation
Saturation level of the PS Saturation block in the actuator model. The default value is
0.3.
Ports
The block has one physical signal input port and one physical signal output port.
Examples
The Closed-Loop Actuator with Variable-Displacement Pressure-Compensated Pump example illustrates the use of the Proportional and Servo-Valve Actuator block in hydraulic systems.