Variable-Displacement Pump (TL)
Variable-displacement bidirectional thermal liquid pump

Libraries:
Simscape /
Fluids /
Thermal Liquid /
Pumps & Motors
Description
The Variable-Displacement Pump block represents a device that extracts power from a mechanical rotational network and delivers it to a thermal liquid network. The pump displacement varies during simulation according to the physical input signal at port D.
Ports A and B represent the pump inlets. Ports R and C represent the drive shaft and case. During normal operation, the pressure gain from port A to port B is positive if the angular velocity at port R relative to port C is positive.
Operating Modes
The block has four modes of operation, as shown by this image.
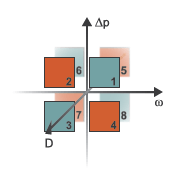
The working mode depends on the pressure gain from port A to port B, Δp = pB – pA; the angular velocity, ω = ωR – ωC; and the fluid volumetric displacement at port D. The figure above maps these modes to the octants of a Δp-ω-D chart:
The quadrant labeled 1 represents the forward pump mode. In this mode, the positive shaft angular velocity causes a pressure increase from port A to port B and flow from port A to port B
The quadrant labeled 2 represents the reverse motor mode. In this mode, the flow from port B to port A causes a pressure decrease from B to A and negative shaft angular velocity.
The quadrant labeled 3 represents the reverse pump mode. In this mode, the negative shaft angular velocity causes a pressure increase from port B to port A and flow from port B to port A
The quadrant labeled 4 represents the forward motor mode. In this mode, the flow from port A to port B causes a pressure decrease from A to B and positive shaft angular velocity.
The quadrant labeled 5 represents the reverse motor mode. In this mode, the flow from port B to port A causes a pressure decrease from B to A and positive shaft angular velocity.
The quadrant labeled 6 represents the forward pump mode. In this mode, the negative shaft angular velocity causes a pressure increase from port A to port B and flow from port A to port B
The quadrant labeled 7 represents the forward motor mode. In this mode, the flow from port A to port B causes a pressure decrease from A to B and negative shaft angular velocity.
The quadrant labeled 8 represents the reverse pump mode. In this mode, the positive shaft angular velocity causes a pressure increase from port B to port A and flow from port B to port A
The response time of the pump is negligible in comparison with the system response time. The pump reaches steady state nearly instantaneously and is treated as a quasi-steady component.
Energy Balance
The block associates the mechanical work done by the pump with an energy exchange. The governing energy balance equation is:
where:
ΦA and ΦB are the energy flow rates at ports A and B, respectively.
Phydro is the pump hydraulic power, which is a function of the pressure difference between the pump ports: .
The block generates mechanical power due to torque, τ, and angular velocity, ω:
Flow Rate and Driving Torque
The mass flow rate generated at the pump is
where:
is the actual mass flow rate.
is the ideal mass flow rate.
is the internal leakage mas flow rate.
The driving torque required to power the pump is
where:
τ is the actual driving torque.
τIdeal is the ideal driving torque.
τFriction is the friction torque.
The ideal mass flow rate is
and the ideal required torque is
where:
ρ is the average of the fluid densities at thermal liquid ports A and B.
ω is the shaft angular velocity.
Δp is the pressure gain from inlet to outlet.
D is the Displacement specified at physical signal port D.
Leakage and friction parameterization
You can parameterize leakage and friction analytically, by using tabulated efficiencies or losses, or by using input efficiencies or input losses.
When you set the Leakage and Friction Parameterization
parameter to Analytical, the leakage flow rate is
and the friction torque is
where:
KHP is the Hagen-Poiseuille coefficient for laminar pipe flows. The block computes this coefficient from the specified nominal parameters.
μ is the dynamic viscosity of the fluid, which is the average of the values at the ports.
k is the friction torque vs. pressure gain coefficient at nominal displacement, which the block determines from the Mechanical efficiency at nominal conditions parameter, ηm,nom:
τfr,nom is the friction torque at nominal conditions:
ΔpNom is the value of the Nominal pressure gain parameter. This value is the pressure gain at which the nominal volumetric efficiency is specified.
DNom is the value of the Nominal Displacement parameter.
τ0 is the value of the No-load torque parameter.
ωNom is the value of the Nominal shaft angular velocity parameter.
The block determines the Hagen-Poiseuille coefficient from the nominal fluid and component parameters
where:
ωNom is the value of the Nominal shaft angular velocity parameter. This value is the angular velocity at which the block specifies the nominal volumetric efficiency.
μNom is the value of the Nominal Dynamic viscosity parameter. This value is the dynamic viscosity at which the block specifies the nominal volumetric efficiency.
ηv,Nom is the value of the Volumetric efficiency at nominal conditions parameter. This is the volumetric efficiency that corresponds to the specified nominal conditions.
When you set the Leakage and friction parameterization
parameter to Tabulated data - volumetric and mechanical
efficiencies, the leakage flow rate is
and the friction torque is
where:
α is a numerical smoothing parameter for the motor-pump transition.
is the leakage flow rate in motor mode.
is the leakage flow rate in pump mode.
τFriction,Motor is the friction torque in motor mode.
τFriction,Pump is the friction torque in pump mode.
This hyperbolic function describes the smoothing parameter α
where:
ΔpThreshold is the value of the Pressure gain threshold for pump-motor transition block parameter.
ωThreshold is the value of the Angular velocity threshold for pump-motor transition block parameter.
DThreshold is the value of the Displacement threshold for pump-motor transition block parameter.
The block calculates the leakage flow rate from the volumetric efficiency, which the Volumetric efficiency table parameter specifies over the Δp–ɷ–D domain. When operating in pump mode, the leakage flow rate is:
where ηv is the volumetric efficiency, which the block obtains either by interpolation or extrapolation of the tabulated data. Similarly, when operating in motor mode, the leakage flow rate is:
The block calculates the friction torque from the mechanical efficiency, which the Mechanical efficiency table parameter specifies over the Δp–ɷ–D domain. When operating in pump mode, the friction torque is
where ηm is the mechanical efficiency, which the block obtains either by interpolation or extrapolation of the tabulated data. Similarly, when operating in motor mode, the friction torque is
When you set the Leakage and friction parameterization
parameter to Tabulated data - volumetric and mechanical
losses, the block specifies the leakage volumetric flow rate
in tabulated form over the
Δp–ɷ–D
domain:
The block calculates the mass flow rate due to leakage from the volumetric flow rate:
The block calculates the friction torque in tabulated form:
where qLeak(Δp,ω,D) and τFriction(Δp,ω,D) are the volumetric and mechanical losses, specified through interpolation or extrapolation of the tabulated data in the Volumetric loss table and Mechanical loss table parameters.
When you set the Leakage and friction parameterization
parameter to Input signal - volumetric and mechanical
efficiencies, the leakage flow rate and friction torque
calculations are identical to the Tabulated data - volumetric and
mechanical efficiencies setting. The block replaces the
volumetric and mechanical efficiency lookup tables with the physical signal
input ports EV and EM.
The efficiencies are positive quantities with values between
0 and 1.The block sets input values
outside of these bounds are to 0 for inputs smaller than
0 or 1 for inputs greater than
1. The block saturates the efficiency signals at the
value of the Minimum volumetric efficiency or
Minimum mechanical efficiency parameter and the
Maximum volumetric efficiency or Maximum
mechanical efficiency parameter.
When you set the Leakage and friction parameterization
parameter to Input signal - volumetric and mechanical
losses, the leakage flow rate and friction torque calculations
are identical to the Tabulated data - volumetric and mechanical
efficiencies setting. The block replaces the volumetric and
mechanical loss lookup tables with the physical signal input ports
LV and LM.
The block expects the inputs to be positive and sets the signs automatically from the Δp–ɷ quadrant where the component is operating. If you provide a negative signal, the block returns zero losses.
Assumptions and Limitations
The block treats the pump as a quasi-steady component.
The block ignores the effects of fluid inertia and elevation.
The pump wall is rigid.
The block ignores external leakage.
Ports
Input
Conserving
Parameters
Method to compute the flow-rate and torque losses due to internal leaks
and friction. Use the Analytical if the block
parameters are generally available from component data sheets. When you
select Tabulated data - volumetric and mechanical
efficiencies or Tabulated data - volumetric
and mechanical losses, the block uses lookup tables to map
pressure gain, angular velocity, and displacement to component efficiencies
or losses.
When you select Input signal - volumetric and mechanical
efficiencies or Input signal - volumetric and
mechanical losses, the block performs the leakage flow
rate and friction torque calculations the same as the Tabulated
data - volumetric and mechanical efficiencies or
Tabulated data - volumetric and mechanical
losses settings, respectively. When you select
Input signal - volumetric and mechanical
efficiencies, the block enables the
EV and EM ports. You use these
ports to specify the volumetric and mechanical efficiency. When you select
Input signal - volumetric and mechanical
losses, the block enables the LV and
LM ports. You use these ports to specify the
volumetric and mechanical losses.
Fluid displacement for a given volumetric efficiency. These values are typically available at standard operating conditions in the manufacturer data sheet. The block uses this parameter to calculate the leakage flow rate and friction torque.
Angular velocity of the rotary shaft that corresponds to the given volumetric efficiency. The standard operating conditions in the manufacturer data sheet typically list these values. The block uses this parameter to calculate the leakage flow rate and friction torque.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to
Analytical.
Pressure gain that corresponds to the given volumetric efficiency. The standard operating conditions in the manufacturer data sheet typically list these values. The block uses this parameter to calculate the internal leakage flow rate.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to
Analytical.
Dynamic viscosity of the hydraulic fluid for the given volumetric efficiency. These values are typically available at standard operating conditions in manufacturer data sheet. The block uses this parameter to calculate the internal leakage flow rate.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to
Analytical.
Volumetric efficiency for the given conditions. The block defines the volumetric efficiency as the ratio of actual to ideal volumetric flow rates. The standard operating conditions in the manufacturer data sheet typically list these values. The block uses this parameter to calculate the internal leakage flow rate.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to
Analytical.
Ratio of ideal mechanical power to actual mechanical power at nominal conditions.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to
Analytical.
Torque to overcome the seal friction and induce rotation of the mechanical shaft. This torque is the load-independent component of the total friction torque.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to
Analytical.
Pressure gains for the corresponding tabular efficiency or loss data. The vector must be at least two elements in strictly increasing order.
Specify the data for a single octant, (ɷ, Δp, D). Refer to Operating Modes for the operation modes corresponding to parameter specifications and the resulting octants.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Tabulated data -
volumetric and mechanical efficiencies or
Tabulated data - volumetric and mechanical
losses.
Shaft angular velocities for the corresponding tabular efficiency or loss data. The vector must be at least two elements in strictly increasing order.
Specify the data for a single octant, (ɷ, Δp, D). Refer to Operating Modes for the operation modes corresponding to parameter specifications and the resulting octants.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Tabulated data -
volumetric and mechanical efficiencies or
Tabulated data - volumetric and mechanical
losses.
Displacements at which to specify the efficiencies or losses tabular data. The vector must be at least two elements in strictly increasing order.
Specify the data for a single octant, (ɷ, Δp, D). Refer to Operating Modes for the operation modes corresponding to parameter specifications and the resulting octants.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Tabulated data -
volumetric and mechanical efficiencies or
Tabulated data - volumetric and mechanical
losses.
Volumetric efficiencies at the specified fluid pressure gains, shaft
angular velocities, and displacements. The efficiencies must be in the range
of 0–1. M,
N, and L are the sizes of the
specified lookup-table vectors:
M is the number of vector elements in the Pressure gain vector, dp parameter.
N is the number of vector elements in the Shaft angular velocity vector, w parameter.
L is the number of vector elements in the Displacement vector, D parameter.
Specify the data for a single octant, (ɷ, Δp, D). Refer to Operating Modes for the operation modes corresponding to parameter specifications and the resulting octants.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Tabulated data -
volumetric and mechanical efficiencies.
Mechanical efficiencies that correspond to the specified fluid pressure
gains, shaft angular velocities, and displacements. The efficiencies must be
in the range of 0–1.
M, N, and L are
the sizes of the specified lookup-table vectors:
M is the number of vector elements in the Pressure gain vector, dp parameter.
N is the number of vector elements in the Shaft angular velocity vector, w parameter.
L is the number of vector elements in the Displacement vector, D parameter.
Specify the data for a single octant, (ɷ, Δp, D). Refer to Operating Modes for the operation modes corresponding to parameter specifications and the resulting octants.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Tabulated data -
volumetric and mechanical efficiencies.
Volumetric losses at the specified fluid pressure gains, shaft angular velocities, and displacements. The block defines volumetric loss as the internal leakage volumetric flow rate between port A and port B. M, N, and L are the sizes of the specified lookup-table vectors:
M is the number of vector elements in the Pressure gain vector, dp parameter.
N is the number of vector elements in the Shaft angular velocity vector, w parameter.
L is the number of vector elements in the Displacement vector, D parameter.
Specify the data for a single octant, (ɷ, Δp, D). Refer to Operating Modes for the operation modes corresponding to parameter specifications and the resulting octants.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Tabulated data -
volumetric and mechanical losses.
Mechanical losses for the given pressure gains, shaft angular velocities, and displacements. The block defines mechanical loss as the friction torque due to seals and internal components. M, N, and L are the sizes of the specified lookup-table vectors:
M is the number of vector elements in the Pressure gain vector, dp parameter.
N is the number of vector elements in the Shaft angular velocity vector, w parameter.
L is the number of vector elements in the Displacement vector, D parameter.
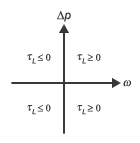
Specify the data for a single octant, (ɷ, Δp, D). Refer to Operating Modes for the operation modes corresponding to parameter specifications and the resulting octants. The tabulated data for the mechanical losses must obey the convention in the figure, with positive values at positive angular velocities and negative values at negative angular velocities.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Tabulated data -
volumetric and mechanical losses.
Smallest allowed value of the volumetric efficiency. The input from the physical signal port EV saturates inputs below this value.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Input signal -
volumetric and mechanical efficiencies.
Largest allowed value of the volumetric efficiency. The input from the physical signal port EV saturates inputs above this value.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Input signal -
volumetric and mechanical efficiencies.
Smallest allowed value of the mechanical efficiency. The input from the physical signal port EM saturates inputs below this value.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Input signal -
volumetric and mechanical efficiencies.
Largest allowed value of the mechanical efficiency. The input from the physical signal port EM saturates inputs above this value.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Input signal -
volumetric and mechanical efficiencies.
Pressure gain from the inlet to the outlet below which the block begins to transition between the motor and pump modes. The block uses a hyperbolic tangent function to smooth the leakage flow rate and friction torque.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Input signal -
volumetric and mechanical efficiencies or
Input signal - volumetric and mechanical
losses.
Shaft angular velocity below which the block begins to transition between the motor and pump modes. The block uses the hyperbolic tangent function to smooth the leakage flow rate and friction torque.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Input signal -
volumetric and mechanical efficiencies or
Input signal - volumetric and mechanical
losses.
Flow area at the component inlet and outlet. The areas are assumed equal.
Volumetric displacement that indicates the transition threshold between motor and pump functionality. A transition region is defined around 0 cm^3/s between the positive and negative values of the displacement threshold. Within this transition region, the computed leakage flow rate and friction torque are adjusted to ensure smooth transition from one mode to the other.
Simulation warning mode for operating conditions outside the range of
tabulated data. If you select Warning, the block
generates a warning when the fluid pressure gain or the shaft angular
velocity cross outside the specified tabular data. The warning does not
cause simulation to stop. If you select Error,
the simulation will stop for conditions outside the range of tabulated data.
Dependencies
To enable this parameter, set Leakage and friction parameterization to:
Tabulated data - volumetric and mechanical efficienciesTabulated data - volumetric and mechanical losses
Simulation warning mode for operating conditions outside the pump mode.
When you set this parameter to Warning, the block
generates a warning if the pump transitions to motoring mode. The warning
does not cause simulation to stop. If you select
Error, the simulation will stop for
conditions outside the pump mode.
Dependencies
To enable this parameter, set Leakage and friction
parameterization to Input signal -
volumetric and mechanical losses.