Hammerstein-Wiener Model
Simulate Hammerstein-Wiener model in Simulink software
Libraries:
System Identification Toolbox /
Models
Description
The Hammerstein-Wiener Model block simulates the output of a
Hammerstein-Wiener model using time-domain input data. The model is an idnlhw model that you previously estimated or constructed in the
MATLAB® workspace. You specify initial conditions for the simulation as one of the
following:
Zero for all states
Initial state vector representing the initial states of the linear block
For information about the structure of a Hammerstein-Wiener model, see What Are Hammerstein-Wiener Models?.
Examples
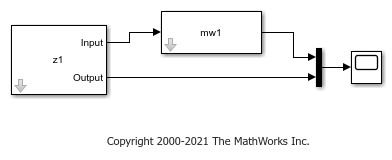
Simulate Hammerstein-Wiener Model in Simulink
Compare the simulated output of a Hammerstein-Wiener Model block to the measured output of a system. You improve the agreement between the measured and simulated responses by estimating initial state values.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2008a