Read, Process, and Write Lidar Point Cloud Data
This example shows how to read a point cloud into the workspace, select a desired set of points, and then write the selected points to a point cloud file format.
Step 1: Read and Display Point Cloud
Read data from a .las file into the workspace by using the lasFileReader function. Display the properties stored in the output lasFileReader object.
fileName = fullfile(toolboxdir("lidar"),"lidardata","las","aerialLidarData.laz"); lasReader = lasFileReader(fileName)
lasReader =
lasFileReader with properties:
Count: 1018047
XLimits: [4.2975e+05 4.3015e+05]
YLimits: [3.6798e+06 3.6801e+06]
ZLimits: [72.7900 125.8200]
Attributes: ["Classification" "LaserReturn" "NumReturns" "ScanDirectionFlag" "EdgeOfFlightLineFlag" "ScanAngle" "UserData" "PointSourceID" "GPSTimeStamp"]
ClassificationInfo: "To get the value, enter lasReader.ClassificationInfo at the Command Window. Learn more"
LaserReturnInfo: [4×2 table]
VariableLengthRecords: [3×3 table]
Show all properties
Read the point cloud from the .las file.
ptCloud = readPointCloud(lasReader);
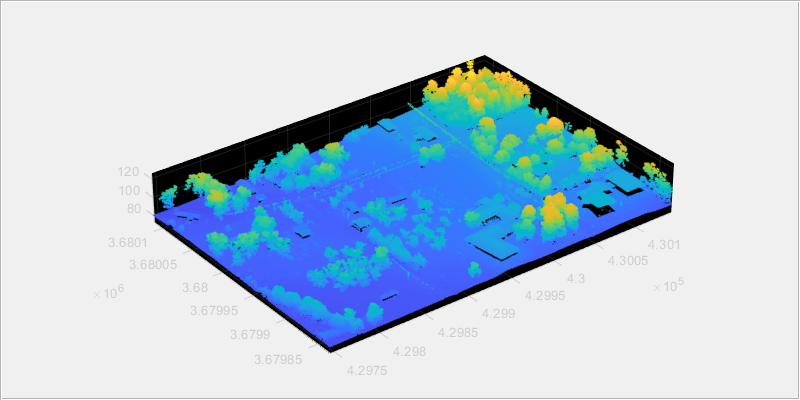
Display the point cloud.
fig = figure(Position=[0 0 800 400]); hPanel = uipanel(fig); hPlot = axes(hPanel); pcshow(ptCloud.Location,Parent=hPlot)
Step 2: Select Desired Set of Points
You can select a desired set of points in the input point cloud by specifying the classification value for the object classes and indices of the points within a region-of-interest (ROI).
Select points by specifying classification value
To select the points by specifying the classification value, read information about the object classes in the input point cloud by using the
ClassificationInfoproperty of thelasFileReaderobject.
disp(lasReader.ClassificationInfo)
Classification Value Class Name Number of Points by Class
____________________ ___________________ _________________________
1 "Unclassified" 114842
2 "Ground" 646632
4 "Medium Vegetation" 210101
6 "Building" 45699
8 "Reserved(8)" 751
9 "Water" 22
Specify the classification value for the object class to read from the input point cloud by using the
readpointCloudfunction. To read the points corresponding to medium vegetation region, set the value forClassificationname-value argument to 4.
ptCloudB = readPointCloud(lasReader,Classification=4);
Display the point cloud.
fig1 = figure(Position=[0 0 800 400]); hPanel1 = uipanel(fig1); hPlot1 = axes(hPanel1); pcshow(ptCloudB.Location,Parent=hPlot1)

Select points by specifying indices
Define a cuboid ROI within the range of the x, y and z coordinates of the input point cloud.
roi = [lasReader.XLimits(1)+200, lasReader.XLimits(2), ...
lasReader.YLimits(1), lasReader.YLimits(2), lasReader.ZLimits(1), lasReader.ZLimits(2)];Find the indices of the points that lie within the cuboid ROI.
indices = findPointsInROI(ptCloudB,roi);
Select the points that lie within the cuboid ROI and store as a point cloud object.
ptCloudC = select(ptCloudB,indices);
Display the point cloud.
fig2 = figure(Position=[0 0 800 400]); hPanel2 = uipanel(fig2); hPlot2 = axes(hPanel2); pcshow(ptCloudC.Location,Parent=hPlot2)

Step 3: Write Selected Points to .las File format
Specify the name for the .las file and create a lasFileWriter object.
newfileName = "aerialvegetation.las";
lasWriter = lasFileWriter(newfileName);Write the selected points to the .las file by using the writePointCloud function. The function creates the new file in the current working directory.
writePointCloud(lasWriter,ptCloudC);
Step 4: Check Properties of the Newly Written File
newlasReader = lasFileReader(newfileName)
newlasReader =
lasFileReader with properties:
Count: 116598
XLimits: [4.2995e+05 4.3015e+05]
YLimits: [3.6798e+06 3.6801e+06]
ZLimits: [84.9500 123.1100]
Attributes: ["Classification" "LaserReturn" "NumReturns" "ScanDirectionFlag" "EdgeOfFlightLineFlag" "ScanAngle" "UserData" "PointSourceID" "GPSTimeStamp" "ScannerChannel"]
ClassificationInfo: "To get the value, enter newlasReader.ClassificationInfo at the Command Window. Learn more"
LaserReturnInfo: [1×2 table]
VariableLengthRecords: [1×3 table]
Show all properties
See Also
lasFileReader | pcshow | readPointCloud | findPointsInROI | pointCloud | select