pointCloud
Object for storing 3-D point cloud
Description
The pointCloud object creates point cloud data from a set of
points in 3-D coordinate system. The points generally represent the
x,y, and z geometric coordinates
for samples on a surface or of an environment. Each point can also be represented with
additional information, such as the RGB color. The point cloud data is stored as an object
with the properties listed in Properties. Use Object Functions to retrieve, select, and remove desired
points from the point cloud data.
Creation
Description
ptCloud = pointCloud(___,Name=Value)Color=[1 0 0] sets the color of the point cloud to
red.
Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Before R2021a, use commas to separate each name and value, and enclose
Name in quotes.
Example: Color=[1 0 0] sets the color of the point cloud to
red.
Point cloud color, specified as an RGB value as one of, a color string, a 1-by-3 vector, or an M-by-3 or M-by-N-by-3 array. M-by- N specifies the dimensions of the point cloud. Each entry specifies the RGB color of a point in the point cloud data. Therefore, you can specify the same color for all points or a different color for each point.
For
singleordoubledatatype, theColorRGB value must be specified in the range [0, 1].For
uint8datatype, theColorRGB value must be specified in the range [0, 255].For
uint16datatype, theColorRGB value must be specified in the range [0, 65535].The function stores the
Colorvalue as either an M-by-3 or M-by-N-by-3. If you specify the color as a string or a 1-by-3 vector, the function converts it to one of these dimensions.
| Color | Format | Example |
|---|---|---|
| Specify one color for all points | string scalar or character vector |
|
1-by-3 vector |
| |
| Specify a color for each point | M-by-3 matrix, as a list of RGB values | 255 0 0 255 0 0 0 255 255  |
M-by-N-by-3 array for an organized point cloud containing RGB values for each point, where M-by-N is the dimension of the point cloud. |
|


Data Types: uint8 | uint16 | single | double
Surface normals, specified as a M-by-3 or M-by-N-by-3 array. Use this property to specify the normal vector with respect to each point in the point cloud. Each entry in the surface normals specifies the x, y, and z component of a normal vector.
| Coordinates | Surface Normals |
|---|---|
| M-by-3 array | M-by-3 array, where each row contains a corresponding normal vector. |
| M-by-N-by-3 array | M-by-N-by-3 array containing a 1-by-1-by-3 normal vector for each point. |
Data Types: single | double
Grayscale intensities at each point, specified as a M-by-1 vector or M-by-N matrix. The function maps each intensity value to a color value in the current colormap.
| Coordinates | Intensity |
|---|---|
| M-by-3 array | M-by-1 vector, where each row contains a corresponding intensity value. |
| M-by-N-by-3 array | M-by-N matrix containing intensity value for each point. |
Data Types: single | double | uint8 | uint16
Output Arguments
Properties
Object Functions
findNearestNeighbors | Find nearest neighbors of query points in point cloud |
findNeighborsInRadius | Find neighbors within radius for query points in point cloud |
findPointsInROI | Find points within a region of interest in the point cloud |
findPointsInCylinder | Find points within a cylindrical region in a point cloud |
removeInvalidPoints | Remove invalid points from point cloud |
select | Select points in point cloud |
copy | Copy array of point cloud objects |
Examples
Read the 3-D coordinate points into the workspace.
load("xyzPoints");Create a point cloud object from the input point coordinates.
ptCloud = pointCloud(xyzPoints);
Inspect the properties of the point cloud object.
ptCloud
ptCloud =
pointCloud with properties:
Location: [5184×3 single]
Count: 5184
XLimits: [-3 3.4338]
YLimits: [-2 2]
ZLimits: [0.0016 3.1437]
Color: []
Normal: []
Intensity: []
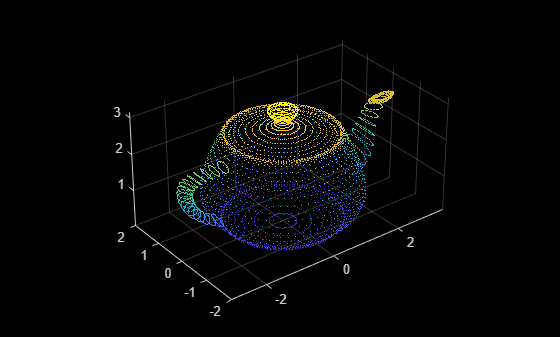
Display the point cloud by using pcshow.
pcshow(ptCloud)
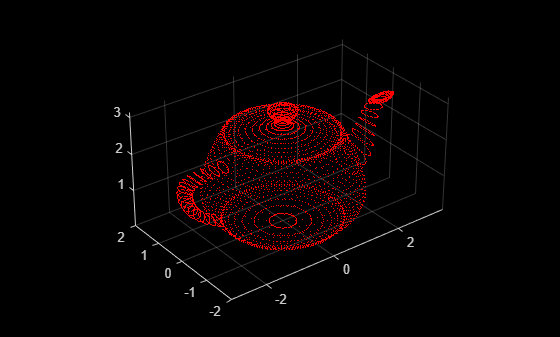
Modify Color of Point Cloud Data
Create an RGB color array of size same as the size of the point cloud data. Set the point colors to Red.
cmatrix = ones(size(ptCloud.Location)).*[1 0 0];
Create the point cloud object with the color property set to the RGB color array.
ptCloud = pointCloud(xyzPoints,Color=cmatrix); pcshow(ptCloud)
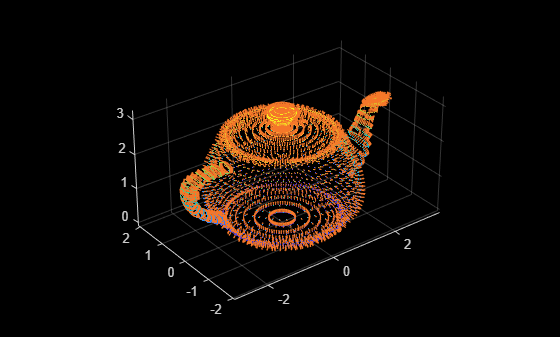
Add Surface Normals to Point Cloud Data
Compute surface normals corresponding to the point cloud data using pcnormals.
normals = pcnormals(ptCloud);
Create point cloud object from input point coordinates. Add the computed surface normals to point cloud object.
ptCloud = pointCloud(xyzPoints,Normal=normals);
Display the point cloud and plot the surface normals.
pcshow(ptCloud) x = ptCloud.Location(:,1); y = ptCloud.Location(:,2); z = ptCloud.Location(:,3); u = normals(:,1); v = normals(:,2); w = normals(:,3); hold on quiver3(x,y,z,u,v,w); hold off
Tips
The pointCloud object is a handle object. If you want to create a separate copy of a point cloud, you can use
the MATLAB®
copy method.
ptCloudB =
copy(ptCloudA) |
If you want to preserve a single copy of a point cloud, which can be modified by point cloud functions, use the same point cloud variable name for the input and output.
ptCloud =
pcFunction(ptCloud) |
Extended Capabilities
Version History
Introduced in R2015aSee Also
Functions
pccat|pcalign|pcshow|pcwrite|pcread|pcmerge|pcdenoise|pcnormals|pcfromkinect|reconstructScene|pcdownsample|pctransform|pcregistericp