pctransform
Transform 3-D point cloud
Description
ptCloudOut = pctransform(ptCloudIn,tform)tform to the
point cloud, ptCloudIn. The transformation can be a rigid,
similarity, or affine transformation.
ptCloudOut = pctransform(ptCloudIn,D)D to the point cloud. Point
cloud transformation using a displacement field define translations with respect
to each point in the point cloud.
Examples
Read a point cloud.
ptCloud = pcread('teapot.ply');Plot the point cloud.
figure pcshow(ptCloud) xlabel('X') ylabel('Y') zlabel('Z')
Create a transformation object with a 45 degree rotation along the z-axis.
rotationAngles = [0 0 45]; translation = [0 0 0]; tform = rigidtform3d(rotationAngles,translation);
Transform the point cloud.
ptCloudOut = pctransform(ptCloud,tform);
Plot the transformed point cloud.
figure pcshow(ptCloudOut) xlabel('X') ylabel('Y') zlabel('Z')
This example applies a rigid transformation (rotation) and a nonrigid transformation (shear) to a 3-D point cloud.
Read a point cloud into the workspace.
ptCloud = pcread('teapot.ply');Plot the original 3-D point cloud.
figure1 = figure; axes1 = axes(Parent=figure1); pcshow(ptCloud,Parent=axes1,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title('3-D Point Cloud',FontSize=14)
Rotation of 3-D Point Cloud
Create a rigid transformation object that defines a 45 degree rotation along the z-axis.
rotationAngles = [0 0 45]; translation = [0 0 0]; tform = rigidtform3d(rotationAngles,translation);
Transform the point cloud.
ptCloudOut1 = pctransform(ptCloud,tform);
Plot the rotated point cloud.
figure2 = figure; axes2 = axes(Parent=figure2); pcshow(ptCloudOut1,Parent=axes2,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title({'Rotation of 3-D Point Cloud'},FontSize=14)
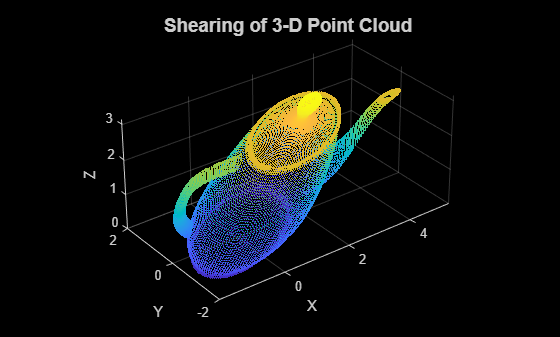
Shearing of 3-D Point Cloud
Create an affine transformation object that defines shearing along the x-axis.
A = [1 0.75 0.75 0; ... 0 1 0 0; ... 0 0 1 0; ... 0 0 0 1]; tform = affinetform3d(A);
Transform the point cloud.
ptCloudOut2 = pctransform(ptCloud,tform);
Plot the transformed point cloud.
figure3 = figure; axes3 = axes(Parent=figure3); pcshow(ptCloudOut2,Parent=axes3,AxesVisibility='on'); xlabel('X'); ylabel('Y'); zlabel('Z'); title({'Shearing of 3-D Point Cloud'},FontSize=14)
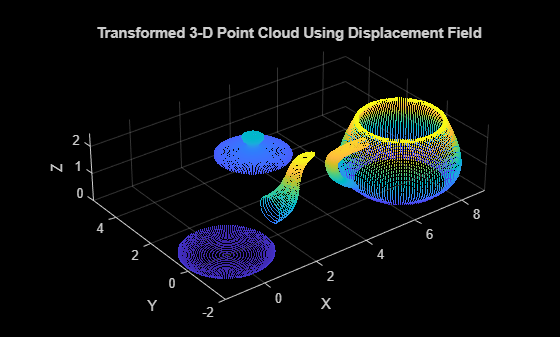
Read a point cloud into the workspace.
ptCloud = pcread('teapot.ply');Create a displacement field D of same size as the point cloud.
D = zeros(size(ptCloud.Location));
Set the displacement field value along x-axis for the first half of the points to 7.
pthalf = ptCloud.Count/2; D(1:pthalf,1) = 7;
Extract the indices of points within a region-of-interest (ROI) using the pointCloud method findNeighborsInRadius. Set the displacement field value along the x-, y-, and z-axis for points within the ROI to 4, 4, and -2, respectively.
indices = findNeighborsInRadius(ptCloud,[0 0 3.1],1.5); D(indices,1:2) = 4; D(indices,3) = -2;
Transform the point cloud using the displacement field.
ptCloudOut = pctransform(ptCloud,D);
Display the original and transformed point cloud.
figure pcshow(ptCloud) xlabel('X'); ylabel('Y'); zlabel('Z'); title('Original 3-D Point Cloud')
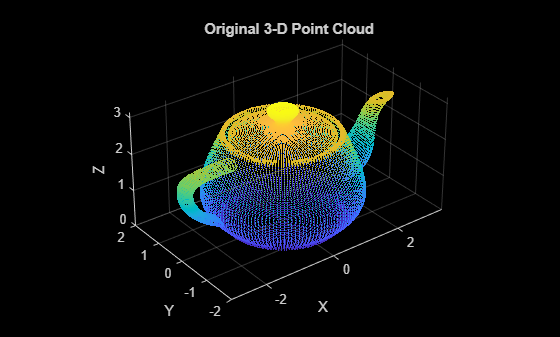
figure pcshow(ptCloudOut) xlabel('X'); ylabel('Y'); zlabel('Z'); title('Transformed 3-D Point Cloud Using Displacement Field')
Input Arguments
Output Arguments
Extended Capabilities
Version History
Introduced in R2015aSee Also
Objects
Functions
pcplayer|pcshow|pcwrite|pcread|pcmerge|pcdownsample|pcfitplane|pcdenoise|pcregistericp|pccat|pcalign