dde23
Solve delay differential equations (DDEs) with constant delays
Description
sol = dde23(ddefun,delays,history,tspan,options)options, which is a structure
created with the ddeset function. For example, use the
AbsTol and RelTol options to specify absolute and
relative error tolerances, or the Jumps option to provide locations of
discontinuities.
Examples
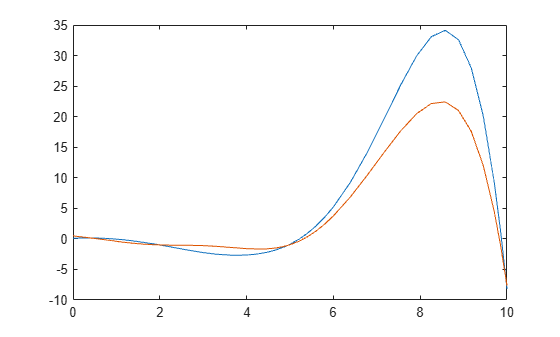
Solve the system of delay differential equations
,
where has a constant solution history and has a constant solution history for . The time delay applied to is 2 and the time delay applied to is 1.
Define the system of DDEs as a local function named ddefun.
function dydt = ddefun(t,y,Z) ydelay1 = Z(:,1); ydelay2 = Z(:,2); dydt = [-2*ydelay1(1) + y(2); y(1) - 2*ydelay2(2)]; end
Specify the interval of integration as [0 10], the time delays as a vector [2; 1], and the solution history as a vector [0.1; 0.5]. Solve the DDE using dde23.
tspan = [0 10]; delays = [2; 1]; history = [0.1; 0.5]; sol = dde23(@ddefun,delays,history,tspan);
Plot the results.
plot(sol.x,sol.y)
Solve the DDE
,
where for .
Define the DDE as a local function named ddefun.
function dydt = ddefun(t,y,ydelay) dydt = -2*ydelay*(1+y); end
Define the solution history as a local function named history.
function h = history(t) h = t; end
Locate the zeros of the equation without terminating the integration by using the ddeset function to specify the Events field of the integrator options structure.
function [position,isterminal,direction] = zeroEventsFcn(t,y,ydelay) position = y(1); isterminal = 0; direction = 0; end opts = ddeset(Events=@zeroEventsFcn);
Specify the interval of integration as [0 10] and the time delay as 1. Then solve the DDE using dde23.
tspan = [0 10]; delays = 1; sol = dde23(@ddefun,delays,@history,tspan,opts);
Plot the results and the locations of the zero crossings.
plot(sol.x,sol.y,sol.xe,sol.ye,"o")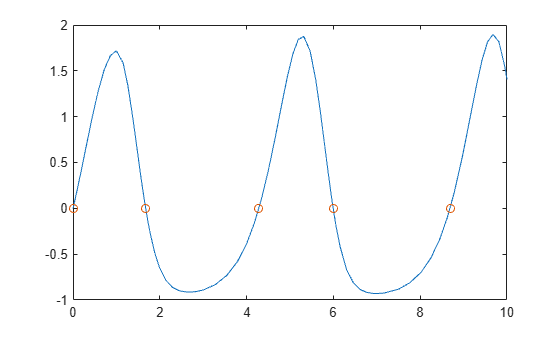
Input Arguments
Output Arguments
Algorithms
dde23 tracks discontinuities and integrates with the explicit
Runge-Kutta (2,3) pair and interpolant of ode23. It uses iteration to take
steps longer than the time delays.
References
[1] Shampine, Lawrence F., and S. Thompson. "Solving DDEs in MATLAB." Applied Numerical Mathematics 37, no. 4 (June 2001): 441–458. https://doi.org/10.1016/S0168-9274(00)00055-6.
[2] Kierzenka, Jacek. "Tutorial on Solving DDEs with DDE23." MATLAB Central File Exchange. Updated September 1, 2016. https://www.mathworks.com/matlabcentral/fileexchange/3899-tutorial-on-solving-ddes-with-dde23.
[3] Willé, David R., and Christopher T. H. Baker. "DELSOL—a Numerical Code for the Solution of Systems of Delay-Differential Equations." Applied Numerical Mathematics 9, no. 3 (April 1992): 223–234. https://doi.org/10.1016/0168-9274(92)90017-8.
Version History
Introduced before R2006a