Working with BeagleBone Black Hardware
This example shows you the basics of working with BeagleBone Black® Hardware.
Introduction
BeagleBone Black is a single board, credit-card size computer that can run Linux®. BeagleBone Black hardware has low-level interfaces intended to connect directly with external devices such as A/D converters, sensors, motor drivers, etc. You can take advantage of these low-level interfaces to develop meaningful real-world applications. The BeagleBone Black support package includes MATLAB command-line interfaces to communicate with external devices connected to BeagleBone Black hardware. You can, for example, turn a LED connected to one of the GPIO pins on or off or sense the position of a push button from the MATLAB command prompt.
Most of the low-level interfaces of BeagleBone Black hardware are not plug-and-play. To use these low-level interfaces, you must have a sound understanding of basic electrical concepts. If you mis-wire a GPIO pin, for example, you risk damaging a GPIO pin, and, in some cases, your entire BeagleBone Black hardware.
This example is intended to familiarize you with low level interfaces of the BeagleBone Black hardware, establish sound practices for wiring and connections when working with external electrical components and use MATLAB command-line interface for BeagleBone Black hardware to control simple devices like LEDs and push buttons.
Prerequisites
It is helpful to complete the Getting Started with MATLAB Support Package for BeagleBone Black Hardware example.
Required Hardware
To run this example, you need the following hardware:
BeagleBone Black hardware
Breadboard and jumper cables
Red LED
330 Ohm, 1 kOhm and 10 kOhm resistors
A push button or switch
Overview of BeagleBone Black Hardware
In addition to USB, Ethernet and HDMI, the BeagleBone Black hardware has expansion headers that offer general purpose digital I/O, analog input, PWM, SPI, I2C and UART.
BeagleBone Black hardware have two expansion headers, P8 and P9. Each pin of the expansion headers can be configured and used for different functionalities. To see the current pin map of your BeagleBone Black hardware, use showPins() method of beaglebone object. To see all the possible pin map, use showAllPins() method.
bbb = beaglebone; showPins(bbb); showAllPins(bbb);
The GPIO pins use 3.3 volt logic levels and are not 5 volt tolerant. There is no over-voltage protection on the CPU chip.
You can power external components using 3.3 volt and 5 volt power pins on the expansion headers. The maximum permitted current draw from the 3.3 volt pins is 50 mA.
Best Practices and Restrictions
Do not connect electrical components to BeagleBone Black expansion headers while BeagleBone Black hardware is running. If you want to connect an electrical component, turn off your board first. Instructions for turning off you board are provided below.
BeagleBone Black pins use 3.3 volt logic levels. Do not connect devices using 5 volt logic levels directly to the BeagleBone Black pins.
Use logic level converters when interfacing devices using 5 volt logic levels to BeagleBone Black hardware.
Do not short a GPIO pin configured as digital output.
Do not short 5 volt power pins to any other pin on the expansion header. Be extremely careful when working in the vicinity of 5 volt power pins.
Do not touch bare expansion header pins while BeagleBone Black hardware is on. You can accidentally short some of the pins.
Turning Your BeagleBone Black Hardware On and Off
BeagleBone Black runs a Linux operating system. Turning off the power can result in operating system corruption. To turn off your board, first shut down the Linux operating system by executing the following:
system(bbb, 'sudo shutdown -h now'); clear bbb
You can also execute the preceding command above on an interactive command shell as described in the Getting Started with MATLAB Support Package for BeagleBone Black Hardware example. After executing the command, wait until the operating system shuts down all LED's on the board except for PWR LED. Then, unplug the power cable from the board. To restart your board, plug the power cable back into the board. It takes approximately twenty seconds for the board to fully reboot.
Working with LEDs
A light-emitting diode (LED) is a semiconductor light source. An LED has two legs. One is called anode and the other is called cathode. The two legs of LED have different names because LED works only in one direction. The anode leg is longer than the cathode leg, and must be attached to the positive voltage terminal while the cathode is attached to the negative voltage terminal. The current going through an LED goes from anode to cathode. If you wire an LED backwards, it does not light up.
LEDs come in different colors and sizes. Common sizes are 3mm, 5mm and 10mm and refer to the diameter of the LED. A red LED, when it is on will have a forward voltage anywhere from 1.8 volts to 2.5 volts. When a LED is on, it behaves like a diode and passes a large amount of current that may produce enough heat to cause the LED to burn out. Therefore, you should always use a current-limiting resistor when working with an LED.
In this example, you connect a red LED across a GPIO pin and turn the LED on and off using the MATLAB command-line interface. You need a red LED and a 330 Ohm resistor. You connect the LED and the resistor as shown in the circuit diagram.
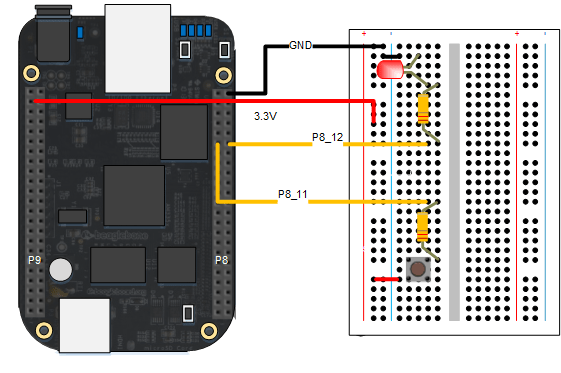
The anode (positive or long leg) is connected to the P8_12 pin and the cathode is connected to the ground through the resistor. Once you make the connections, execute the following command at the MATLAB command prompt to turn the LED on.
clear bbb bbb = beaglebone writeDigitalPin(bbb, 'P8_12', 1);
The writeDigitalPin() method configures GPIO pin P8_12 as output and sets the logical value of the digital pin to one (logic high) causing 3.3 volts to be output at the pin. Writing a zero to a digital pin results in an output of logic low, which is digital ground in this case.
Make the LED "blink" for 10 seconds.
for i = 1:10
writeDigitalPin(bbb, 'P8_12', 1);
pause(0.5);
writeDigitalPin(bbb, 'P8_12', 0);
pause(0.5);
endWorking with Push Buttons
A push button is a simple switch mechanism. When pressed or in closed position, the legs of a push button are shorted allowing electrical current to pass. When in open position, the switch does not conduct electricity. You can use a digital input pin to sense if the push button is in an open or closed position.
For this task, you need a breadboard-friendly push button and 1 kOhm and 10 kOhm resistors. Connect the push button to GPIO pin 23, as shown in the previous circuit diagram.
In this circuit, the GPIO pin sees ground when the push button is not pressed. When the push button is pressed, the GPIO pin sees 3.3 volts. You can read the position of the push button using the readDigitalPin() method.
readDigitalPin(bbb, 'P8_11')
Push Button Controlled LED
Blink the LED rapidly for 1 second whenever the push button is pressed.
for i = 1:100
buttonPressed = readDigitalPin(bbb, 'P8_11');
if buttonPressed
for j = 1:10
writeDigitalPin(bbb, 'P8_12', 1);
pause(0.05);
writeDigitalPin(bbb, 'P8_12', 0);
pause(0.05);
end
end
pause(0.1);
endSummary
This example introduced the workflow for working with GPIO pins. You learned how to connect LEDs and push buttons to GPIO pins.