receive
Receive IQ signal from radars in the scenario
Description
Examples
Obtain the signal from two platforms in a radar scenario using a radar transceiver. Set the random number seed to ensure the repeatability of the data.
s = rng(0);
scenario = radarScenario('UpdateRate',1);
plat1 = platform(scenario);
plat1.Trajectory.Position = [0,0,0];
plat1.Sensors = radarTransceiver;
plat2 = platform(scenario);
plat2.Trajectory.Position = [1000,0,0];
[sig,sensorConfs] = receive(scenario)sig = 1×1 cell array
{100×2 double}
sensorConfs = struct with fields:
IsScanDone: 0
MechanicalAngle: 0
ElectronicAngle: [2×1 double]
OriginPosition: [3×1 double]
Orientation: [3×3 double]
NextRepetitionTime: 1.0000e-04
ReferenceSensorIndex: 0
Sensor: [1×1 radarTransceiver]
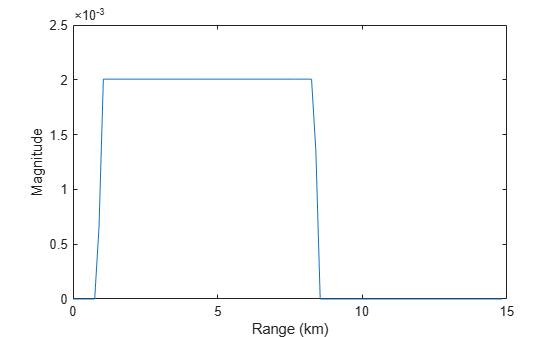
Platform 1 receives echo from platform 2.
rgrid = physconst('lightspeed')*(0:size(sig{1},1)-1)/ ... (2*sensorConfs.Sensor.Waveform.SampleRate)/1e3; plot(rgrid,abs(sum(sig{1},2))) xlabel('Range (km)') ylabel('Magnitude')
Input Arguments
Output Arguments
Version History
Introduced in R2021a
See Also
radarTransceiver | radarScenario | detect | emit | propagate | radarEmission