Collision Detection
Collision geometries define the physical space occupied by robots and their environments. To
represent robot parts or obstacles in the environment, create collision objects like
boxes, cylinders, spheres, or custom meshes. Use checkCollision to determine if different parts of a manipulator arm
collide with each other (self-collisions) or with obstacles in the world while
executing trajectories. The function also gives obstacle clearance to anticipate and
avoid collisions.
Functions
Blocks
Featured Examples
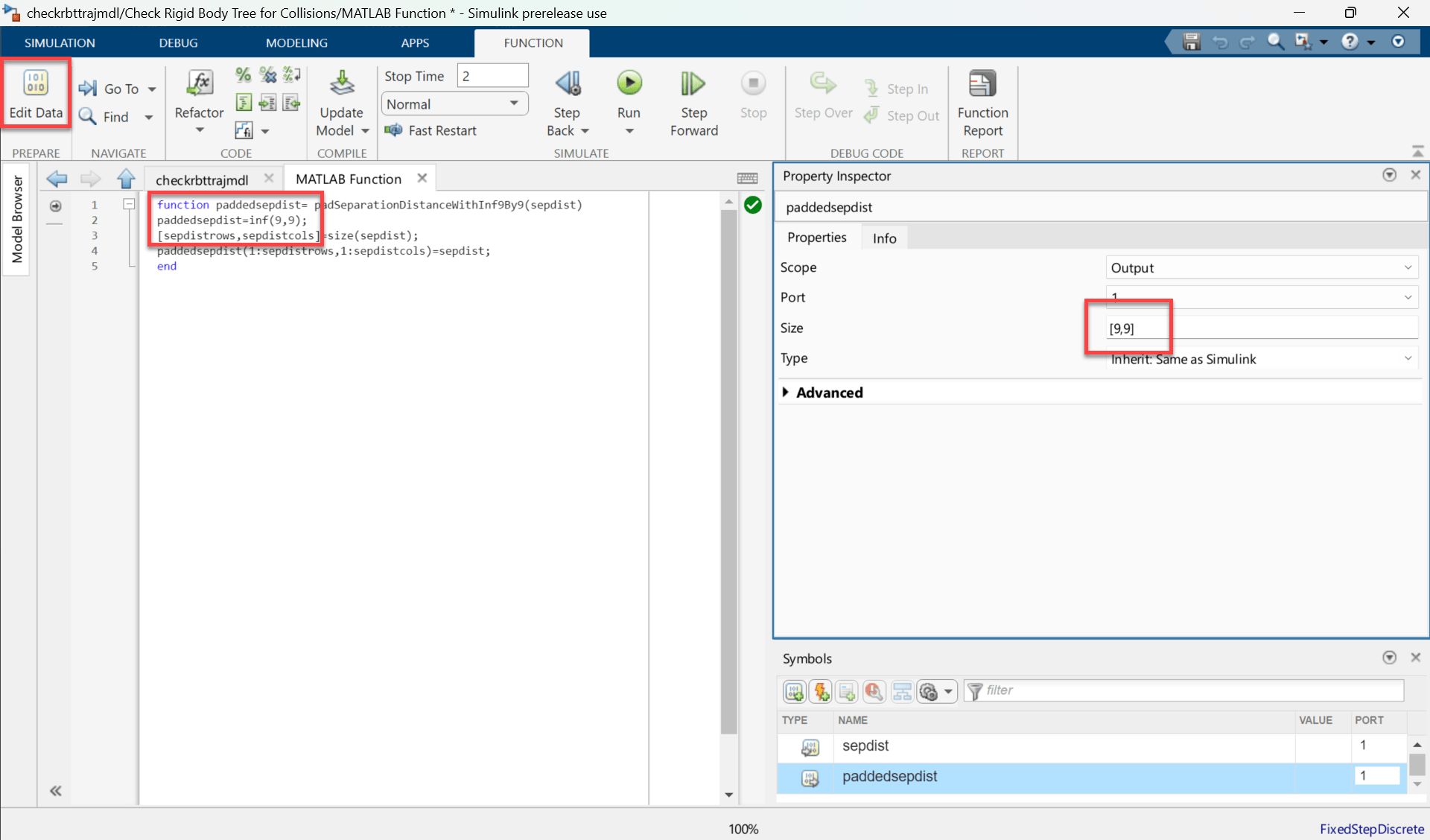
Check Rigid Body Tree Trajectories for Collisions in Simulink
Check self and world collisions of a rigid body tree given an input trajectory in Simulink® with dynamic world obstacles.

Check for Manipulator Self Collisions Using Collision Meshes
Check for self-collisions in KUKA® IIWA-14 serial manipulator using collision meshes from the URDF of the robot model.

Obtain Collision Data for Manipulator Collision Checking
Explore three different ways to obtain a rigid body tree model with collision data for manipulator collision checking.

Reduce Motion Planning Times Using Capsule Approximation
Use capsule approximation on rigid bodies to speed up motion planning using RRT.