Generate B-Spline Trajectory
This example shows how to generate a B-spline trajectory using the Polynomial Trajectory block.
Open the model. The Waypoints and TimeInterval inputs are toggled in the block mask by setting Waypoint source to External. For B-splines, the waypoints are actually control points for the convex polygon, but the first and last waypoints are met. The Time input is just a ramp signal to simulate time progressing.
open_system('bspline_polytraj_ex1.slx')
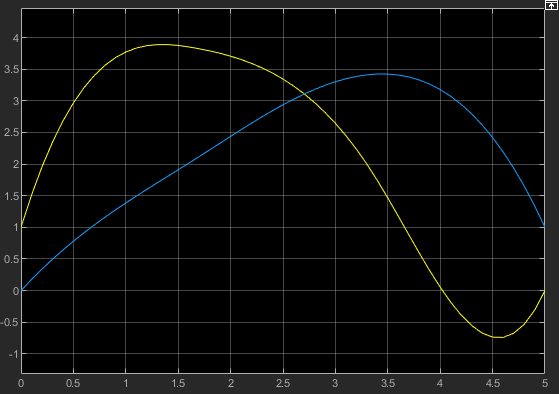
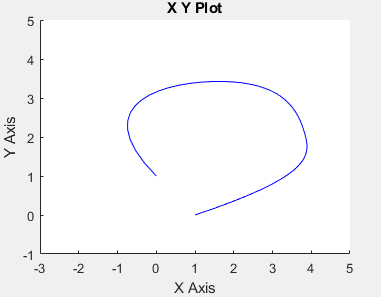
Run the simulation. The first figure shows the output of the q vector for the positions of the trajectory. The X Y Plot shows the actual 2-D trajectory, which stays inside the defined control points and hits the first and last waypoints.