Variable Pulse Generator
Generate ideal, time varying pulse signal
Libraries:
Simulink /
Discontinuities
Description
Use the Variable Pulse Generator block to create ideal modulated pulse signals.
Generally speaking, the output pulse of the block is described by
where pw is the output pulse width.
For an implementation of Pulse Width Modulation, see PWM.
Examples
This example shows you how to model an ideal voltage controlled oscillator using the Variable Pulse Generator block to create the frequency oscillations.
A voltage controlled oscillator uses an input tuning voltage to produce waveforms of varying frequency. Over a small range of voltages, the relationship between the input voltage ( )and the output oscillation frequency (
)and the output oscillation frequency ( ) is proportional and can be expressed as
) is proportional and can be expressed as

where
 is the oscillator sensitivity in Hz/V
is the oscillator sensitivity in Hz/V is the quiescent frequency, or nominal frequency of the oscillator at
is the quiescent frequency, or nominal frequency of the oscillator at 

In the included vco_using_vpg model, the desired oscillation frequency signal F_{in}(t) is generated using the formula shown in equation (1). In this model, the tuning voltage is a sinusoidal waveform.

Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Algorithms
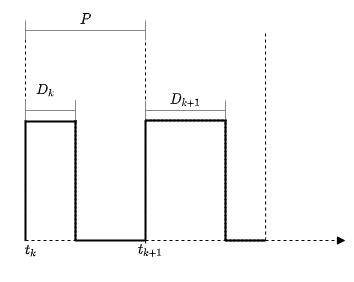
For a pulse starting at time tk
where pw is the pulse width. For a given period P, pw is proportional to the duty cycle D
In Discrete sampling mode, the input duty cycle signal is sampled at the rate specified by the Run at fixed time intervals parameter.
For a specified sampling rate tS , the number of samples needed for a pulse of width pw can be expressed as follows
where nP is the number of samples needed to simulate a pulse of period P.
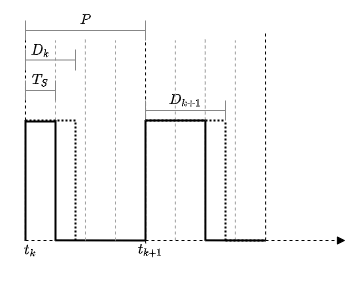
Consider a nominal pulse of period P with the sampling rate of the block set to be tS= 0.25 P. The number of samples needed for one period of the pulse, nP= 4. Thus, for the input duty cycle D= 0.47 , the number of samples n pw is floored to = 1. Therefore, the pulse is high for 1 of the 4 samples in the period.
Extended Capabilities
Version History
Introduced in R2020b