setBlockRateConversion
Set rate conversion settings for tuned block in slTuner interface
Syntax
Description
When you use systune with Simulink®,
tuning is performed at the sampling rate specified by the Ts property
of the slTuner interface. When you use writeBlockValue to
write tuned parameters back to the Simulink model, each tuned
block value is automatically converted from the sample time used for
tuning, to the sample time of the Simulink block. The rate conversion
method associated with each tuned block specifies how this resampling
operation should be performed. Use getBlockRateConversion to
query the block conversion rate and use setBlockRateConversion to
modify it.
setBlockRateConversion( sets
the rate conversion method of a tuned block in the st,blk,method)slTuner interface, st.
Examples
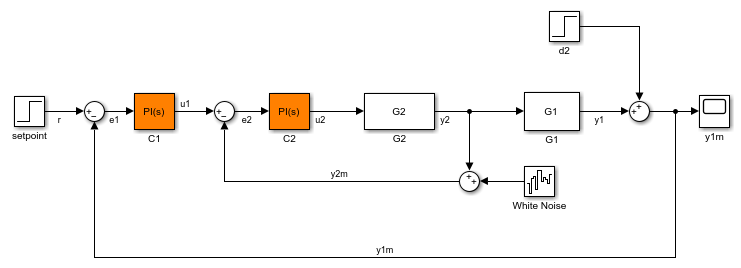
Create an slTuner interface for the Simulink model scdcascade. Set the block rate conversion settings of one of the tuned blocks.
open_system('scdcascade') st = slTuner('scdcascade',{'C1','C2'});
Examine the default block rate conversion for the PID Controller block C1.
[IF,DF] = getBlockRateConversion(st,'C1')
IF =
'Trapezoidal'
DF =
'Trapezoidal'
By default, both the integrator and derivative filter controller methods are Trapezoidal. Set the integrator to BackwardEuler and the derivative to ForwardEuler.
IF = 'BackwardEuler'; DF = 'ForwardEuler'; setBlockRateConversion(st,'C1',IF,DF);
Input Arguments
More About
Tips
For Model Discretizer blocks, the rate conversion method is specified in the Simulink block and cannot be modified with
setBlockRateConversion.For static blocks such as Gain or Lookup Table blocks, the block rate conversion method is ignored.
Version History
Introduced in R2014a