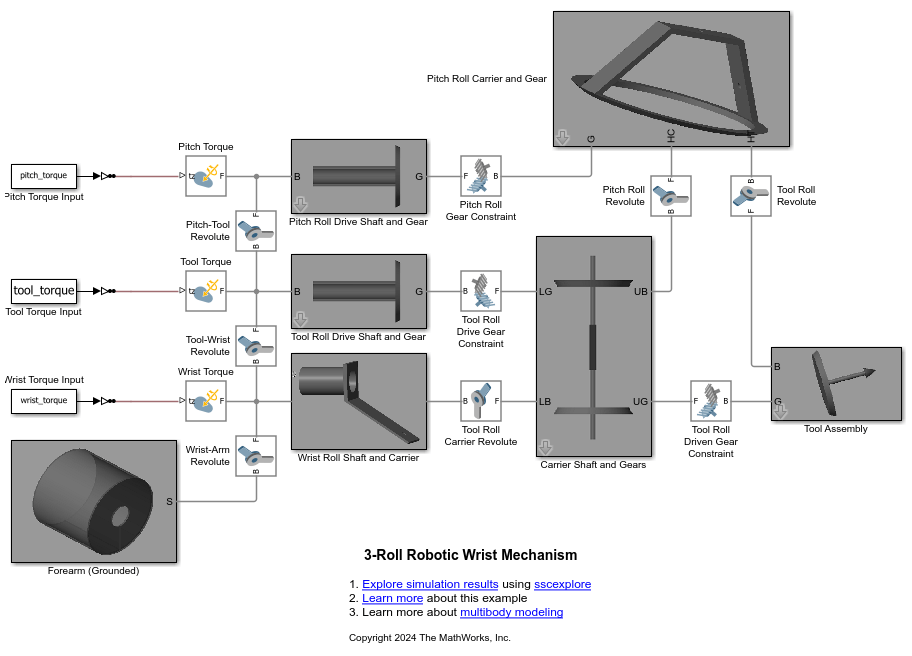
3-Roll Robotic Wrist Mechanism
This example models a 3-Roll robotic wrist mechanism based on the Cincinnati-Milacron 3-roll wrist mechanism. The mechanism uses three bevel gear pairs to rotate the tool about 3 independent axes. The tip of the tool moves along the surface of a sphere and can be rotated about an axis that passes through the center of that sphere (drilling action). In this example, precomputed torques are applied to the three drive shafts to achieve a certain trajectory (on the surface of the sphere) of the tool tip. Drilling is performed at different points along the trajectory.