Modeling and Measuring System Dynamics
A multibody system includes groups of interconnected bodies. You can use Simscape™ Multibody™ to specify dynamic behaviors of the system and measure quantities at the joints or between bodies that are not connected by joints. For more information about the multibody dynamics simulation, see Multibody Dynamics.
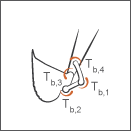
Provide Joint Actuation Inputs

Identify the joints to actuate and the actuation type to use. Then, model the actuation inputs as time-varying physical signals and connect them to the various joints. See Specify Joint Actuation Torque for an example.
Specify Joint Internal Mechanics
Model damping and spring behavior at joints. Specify joint damping coefficients to model energy dissipation and joint spring constants to model energy storage.
Model Body Interactions and External Loads
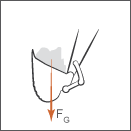
Identify the forces and torques acting at or between bodies not connected by joints. Model these forces and torques explicitly using Forces and Torques blocks. See Model Gravity in a Planetary System for an example.
Sense Dynamical Variables

Identify the forces, torques, and motion variables to sense. You can sense these variables at joints through Joint blocks. You can also sense motion variables using the Transform Sensor block. See Sense Motion Using a Transform Sensor Block for an example.