Sliding Mode Controller
Hysteresis-based sliding mode control
Libraries:
Simscape /
Electrical /
Control /
General Control
Description
The Sliding Mode Controller block implements hysteresis-based sliding mode control (SMC).
The sliding mode controller has this structure.
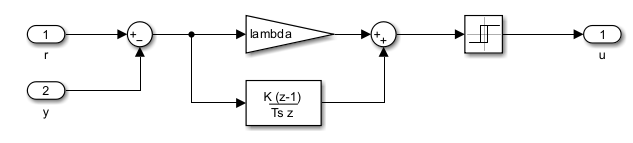
In this controller, lambda is the value of the
Sliding factor parameter. To change the convergence speed of
the error to zero, specify a value greater than 0 for the
Sliding factor parameter.