Simulate Vehicle Dynamics in ZalaZONE Automotive Proving Ground 3D Scene
You can simulate a vehicle ascending a hill using the ZalaZONE Automotive Proving Ground Hill Tracks 3D scene.
To start, build your virtual vehicle using the Virtual Vehicle Composer with these settings:
Powertrain architecture —
Conventional VehicleVehicle Dynamics —
Combined Longitudinal and Lateral DynamicsScenario —
Braking3D Scene Selection —
3D Scene
After you build your virtual vehicle model, set the scene and vehicle starting location.
Set Scene and Vehicle Starting Location
Specify the maneuver scene and vehicle starting location. In this example, specify the ZalaZONE Automotive Proving Ground scene with the vehicle at the recommended starting location for the 25% grade hill. Also specify the scene view.
Open the Driver Commands block and set Vehicle command mode to
Longitudinal Driver.In the
Visualization>3D Enginesubsystem, open the Simulation 3D Scene Configuration block.
For this example, for the Simulation 3D Scene Configuration block:
Set Scene name to
ZalaZONE Hill Tracks.Note
If the scene is not available in the Scene name drop-down list, you must install the scene. See Setup.
Set Scene view to
SimulinkVehicle1.
In the
Environment>Ground Feedbacksubsystem, right-clickGround Feedbacksubsystem and select Variant > Label Mode Active Choice > 3 (Height Map).
Click OK and save the model.
Open the Model Explorer.
In the Model Hierarchy pane, navigate to ConfiguredVirtualVehicleModel > External Data > VirtualVehicleTemplate.
In the list of Referenced Dictionaries, select
PassVeh. Click Open.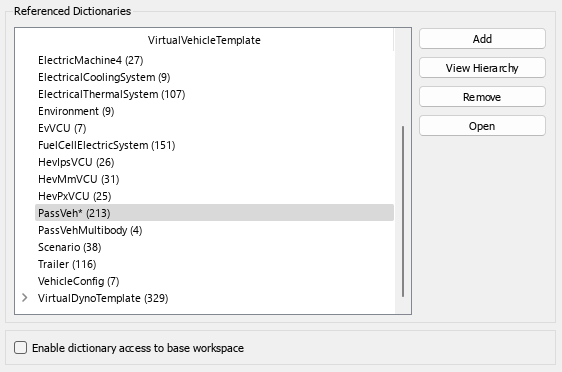
In the Model Hierarchy pane, select ConfiguredVirtualVehicleModel > PassVeh > Design Data.
Set the data dictionary variable value to the initial vehicle position values recommended for the scene. For this example, use these recommended values for the ZalaZONE Automotive Proving Ground Hill Tracks scene.
Data Dictionary Variable Description Recommended Value PlntVehInitLongPosRecommended starting location - X
1441PlntVehInitLatPosRecommended starting location - Y
-1170PlntVehInitVertPosRecommended starting location - Z
-232.5PlntVehInitRollAngRecommended starting location - Roll
0PlntVehInitPitchAngRecommended starting location - Pitch
0PlntVehInitYawAngRecommended starting location - Yaw
-2In the
PassVehdata dictionary, confirm the variable values match the recommended starting values for the scene.
In the Model Explorer, save the
PassVehchanges.
In the list of Referenced Dictionaries, select
Scenario. Click Open.Set the data dictionary variable,
ScnBrkXbraketo80.In the Model Explorer, save the Scenario changes.
Run Simulation
On the ConfiguredVirtualVehicleModel model toolstrip, click
Run. As the simulation runs, view the results in the Simulation
3D Viewer. For this example, view the vehicle ascending the hill and braking at the
top.

See Also
Virtual Vehicle Composer | Acceleration and Braking | Longitudinal Driver | ZalaZONE Automotive Proving Ground Hill Tracks