Image Resizer
Libraries:
Vision HDL Toolbox /
Geometric Transforms
Description
The Image Resizer block downscales grayscale input images. The horizontal and vertical scale factors are independent and you can optionally specify input and output sizes in real time. The block provides an optional antialiasing filter, and you can choose nearest-neighbor or bilinear interpolation.
You can use this block for image resize operations such as:
Converting images to a uniform size for input to deep learning algorithms
Modifying disparate source videos for processing, resource, or display requirements
Examples

Runtime Image Resizing
Configure and use the Image Resizer block with variable input and output image sizes.
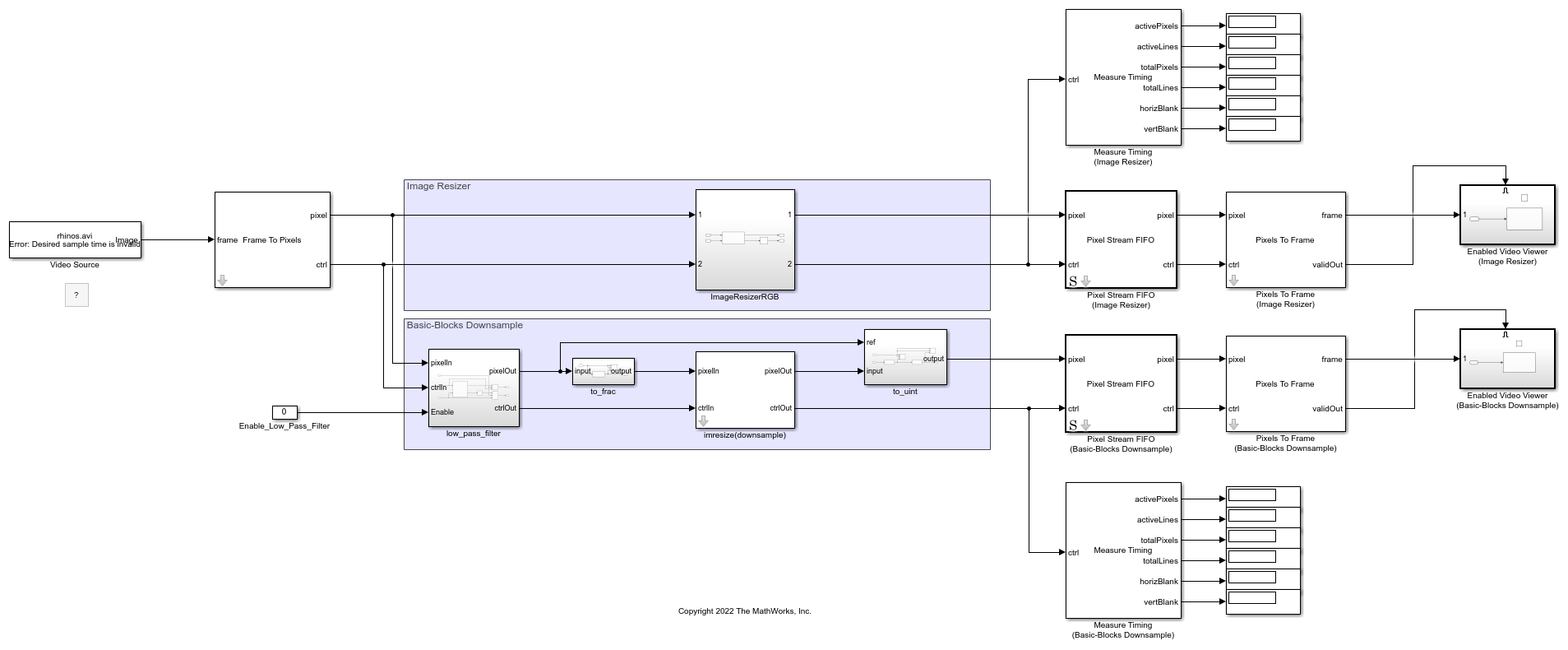
Change Image Size
Downsample a multicomponent image by using the Image Resizer block. The example also shows how to implement custom bicubic and Lanczos-2 interpolation algorithms for FPGAs by using basic Simulink blocks.
Ports
This block uses a streaming pixel interface with a
pixelcontrol bus for frame control signals. All Vision HDL Toolbox™ blocks use the same streaming interface. The block accepts and returns a scalar
pixel value and a bus that contains five control signals. The control signals indicate the
validity of each pixel and its location in the frame. To convert a frame (pixel matrix) into a
serial pixel stream and control signals, use the Frame
To Pixels block. For a full description of the interface, see Streaming Pixel Interface.
Input
Output
Parameters
Main
Dimensions of the input frame, specified as a row vector of the form
[ActiveVideoLines,ActivePixelsPerLine]. The
dimensions must be integers greater than or equal to [16,16] and
less than or equal to [4320,8192].
Dependencies
This parameter appears when you set the Input size source
parameter to Property.
Source of the input active frame size, specified as one of these options:
Property— Specify the input size by using the Input height and width parameter.Input port— Specify the input size by using the inputSize input port. The block samples the inputSize and outputSize ports whenvStartistruein the input control bus.
Dimensions of the largest anticipated input frame, specified as a row vector of
the form [ActiveVideoLines,ActivePixelsPerLine].
The dimensions must be integers greater than or equal to [16,16]
and less than or equal to [4320,8192].
Dependencies
This parameter appears when you set the Input size source
parameter to Input port.
Dimensions of the output frame, specified as a matrix of the form
[ActiveVideoLines,ActivePixelsPerLine]. The
dimensions must be integers greater than or equal to [16,16] and
less than or equal to [4320,8192].
The output dimensions must be less than or equal to the input dimensions.
Dependencies
This parameter appears when you set the Output size source
parameter to Property.
Source of the output active frame size, specified as one of these options:
Property— Specify the output size by using the Output height and width parameter.Input port— Specify the output size by using the outputSize input port. The block samples the inputSize and outputSize ports whenvStartistruein the input control bus.
Dimensions of the largest anticipated output frame, specified as a row vector of
the form [ActiveVideoLines,ActivePixelsPerLine].
The dimensions must be integers greater than or equal to [16,16]
and less than or equal to [4320,8192].
Dependencies
This parameter appears when you set the Output size source
parameter to Input port.
The horizontal blanking interval is the period of inactive cycles between the end of one line and the beginning of the next line. When you select this option, the block includes a buffer to store the output pixels while inserting extra horizontal blanking cycles between the active lines of the output video stream. Set the number of blanking cycles in the Minimum output horizontal blanking parameter. For information on when to use horizontal blanking, see Configure Blanking Intervals.
The horizontal blanking interval is the period of inactive cycles between the end
of one line and the beginning of the next line. If your downstream processing requires
a certain blanking interval, specify that interval in this parameter. This parameter
value must be an integer between 1 and 1195. The
block includes a buffer that stores the output pixels until the minimum number of
blanking cycles is reached.
The recommended minimum horizontal blanking interval for Vision HDL Toolbox library blocks that use a line buffer is 2×Kw when
using padding or 12 cycles when you set the Padding method
parameter to None. For more information on blanking
requirements for image processing systems, see Configure Blanking Intervals.
Dependencies
To enable this parameter, select Insert horizontal blanking.
Method of interpolating pixel values in horizontal and vertical directions, specified as one of these types:
Bilinear— The block implements a two-tap filter in each direction, where the taps are the current and previous pixel values.Nearest Neighbor— The object implements muxes to select the closest of the current pixel value or the previous pixel value. This interpolation method uses the fewest hardware resources, at the tradeoff of coarser interpolation accuracy.
For more information about interpolation methods, see the Change Image Size example.

When you set this property to true,
the object applies an antialiasing filter to the
input image before the resize operation. The antialiasing filter is a separable 5-by-5
filter. The coefficients are [1 4 6 4
1]/16.
Data Types
Specify a rounding method for internal fixed-point calculations.
When you clear this parameter, fixed-point and integer values wrap around to zero when the value overflows what is representable with that data type. When you select this parameter, the value saturates at the maximum representable value.
Specify the data type of the filter coefficients as a data type expression in the
form fixdt(0,WL), where the type is unsigned and
WL is a word length in the range 2 to 17. The block computes the
binary point scaling to accommodate the interpolation coefficients. When converting
the coefficients to the specified data type, the block uses the settings of the
Rounding method and Overflow action
parameters.
The interpolation filter also limits the internal pixel data types to 24 bits wide so that the filter maps to DSP blocks on your FPGA.
Specify the data type of the output pixels as Inherit: Same as first
input or as a data type expression in the form
fixdt(0,WL,0), where the type is unsigned, and
WL is a word length in the range 8 to 16.
Inherit: Same as first input— Sets the data type of the output pixels to match the data type of the input pixel port.<data type expression>— Sets the data type of the output pixels to this data type.
When converting the pixel values to the specified data type, the block uses the settings of the Rounding method and Overflow action parameters.
Algorithms
The resize architecture consists of a scale calculator, buffer, interpolator, and optional
antialiasing filter and output buffer. The scale calculator converts the specified input and
output sizes into accumulators that control the selection of pixels from the buffer. The input
and output sizes can come from parameters or ports. If they come from ports, the block
captures the values when vStart is true in the input
control bus. If you select the antialiasing filter,
the input stream is filtered with a 5-by-5 fixed kernel before entering the input buffer. The
input buffer consists of circular buffers that form the vertical kernels required for the
interpolation filter. The interpolator contains vertical and horizontal filters that use the
interpolation method that you selected. The antialiasing filter and the interpolation filters
use symmetric padding. At the output of the block, the pixelcontrol bus
control signals are regenerated, and data is buffered again if necessary to maintain the
specified minimum horizontal blanking interval.

Extended Capabilities
Version History
Introduced in R2023a