getSectorIndex
Compute conic-sector index of linear system
Syntax
Description
RX = getSectorIndex(H,Q)RX for the linear system H and
the conic sector specified by Q. When RX <
1, all output trajectories y(t)
= Hu(t) lie
in the sector defined by:
for all T ≥ 0.
getSectorIndex can also check whether all
I/O trajectories {u(t),y(t)} of
a linear system G lie in the sector defined by:
for all T ≥ 0.
To do so, use getSectorIndex with H
= [G;I], where I = eyes(nu), and nu is
the number of inputs of G.
For more information about sector bounds and the relative index, see About Sector Bounds and Sector Indices.
DX = getSectorIndex(H,Q,dQ)dQ.
If DX > 0, then the output trajectories of H fit
in the conic sector specified by Q. For more
information about the directional index, see About Sector Bounds and Sector Indices.
The directional index is not available if H is
a frequency-response data (frd) model.
Examples
Check Sector Bounds
Test whether, on average, the I/O trajectories of belong within the sector defined by:
In U/Y space, this sector is the shaded region of the following diagram.
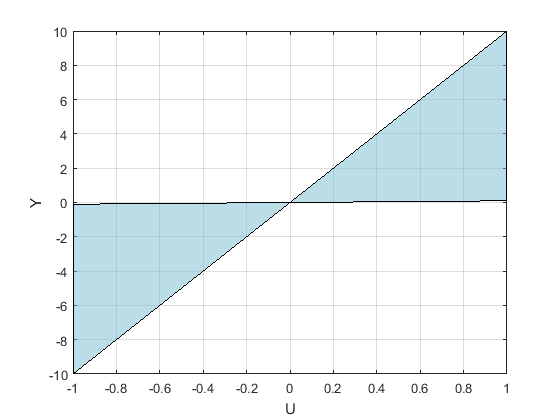
The Q matrix corresponding to this sector is given by:
A trajectory lies within the sector S when for all T > 0,
To check whether trajectories of G satisfy the sector bound, represented by Q, compute the R-index for H = [G;1].
G = tf([1 2],[1 1]); a = 0.1; b = 10; Q = [1 -(a+b)/2 ; -(a+b)/2 a*b]; R = getSectorIndex([G;1],Q)
R = 0.4074
This resulting R is less than 1, indicating that the trajectories fit within the sector. The value of R tells you how tightly the trajectories fit in the sector. This value, R = 0.41, means that the trajectories would fit in a narrower sector with a base 1/0.41 = 2.4 times smaller.
R-Index in Frequency Band for System with Complex Coefficients
For systems with complex coefficients, getSectorIndex can return indices at a negative or a positive frequency depending on the fband you specify.
Load a state-space model with complex coefficients and complex sector matrix.
load dataSysQ sys Q
Compute the R-index and its frequency with a relative accuracy of 0.0001%. Also, specify fband = [1,10] to compute the index in the frequency interval [–10,–1] ∪ [1,10].
[R,FX] = getSectorIndex(sys,Q,1e-6,[1,10])
R = 1.5811
FX = -7.2320
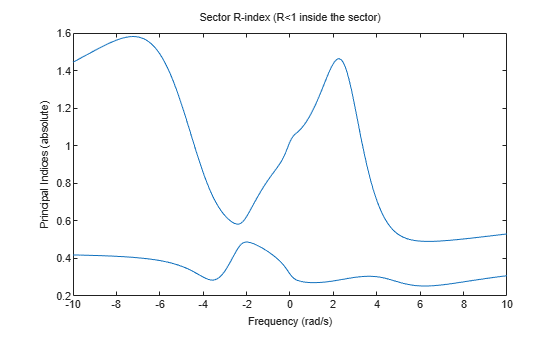
In this interval, sys achieves an index of 1.5811 at a negative frequency value of –7.2320 rad/s. Use sectorplot to plot the indices in this range.
opt = sectorplotoptions; opt.FreqScale = 'Linear'; opt.IndexScale = 'Linear'; w = linspace(-10,10,1000); sectorplot(sys,Q,w,opt)
Now compute the index in the frequency interval [–5,–1] ∪ [1,5]. To do so, specify fband = [1,5].
[r,f] = getSectorIndex(sys,Q,1e-6,[1,5])
r = 1.4630
f = 2.2499
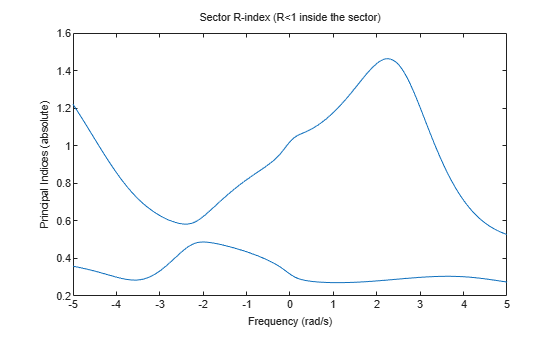
In this interval, sys achieves an index of 1.4630 at a positive frequency value of 2.2499 rad/s. Plot the indices in this range to confirm the result.
w = linspace(-5,5,500); sectorplot(sys,Q,w,opt)
Input Arguments
Output Arguments
Version History
Introduced in R2016a
See Also
getSectorCrossover | getPassiveIndex | getPeakGain | nyquist | sectorplot
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)