plotMesh
Display object meshes on bird's-eye plot
Description
plotMesh(
displays meshes composed of the specified vertices and faces on a bird's-eye plot. To
obtain the mesh vertices and faces of an object in a driving scenario, use the mPlotter,vertices,faces)targetMeshes
function. The mesh plotter, mPlotter, is associated with a birdsEyePlot object and configures the display of the meshes.
The bird's-eye plot assigns a different color to each actor, based on the default color
order of Axes objects. For more details, see the ColorOrder
property for Axes objects.
To remove all meshes associated with mesh plotter mPlotter, call
the clearData
function and specify mPlotter as the input argument.
Examples
Display actors in a driving scenario by using their mesh representations instead of their cuboid representations.
Create a driving scenario, and add a 25-meter straight road to the scenario.
scenario = drivingScenario; roadcenters = [0 0 0; 25 0 0]; road(scenario,roadcenters);
Add a pedestrian and a vehicle to the scenario. Specify the mesh dimensions of the actors using prebuilt meshes.
Specify the pedestrian mesh as a
driving.scenario.pedestrianMeshobject.Specify the vehicle mesh as a
driving.scenario.carMeshobject.
p = actor(scenario,'ClassID',4, ... 'Length',0.2,'Width',0.4, ... 'Height',1.7,'Mesh',driving.scenario.pedestrianMesh); v = vehicle(scenario,'ClassID',1, ... 'Mesh',driving.scenario.carMesh);
Add trajectories for the pedestrian and vehicle.
Specify for the pedestrian to cross the road at 1 meter per second.
Specify for the vehicle to follow the road at 10 meters per second.
waypointsP = [15 -3 0; 15 3 0]; speedP = 1; smoothTrajectory(p,waypointsP,speedP); wayPointsV = [v.RearOverhang 0 0; (25 - v.Length + v.RearOverhang) 0 0]; speedV = 10; smoothTrajectory(v,wayPointsV,speedV)
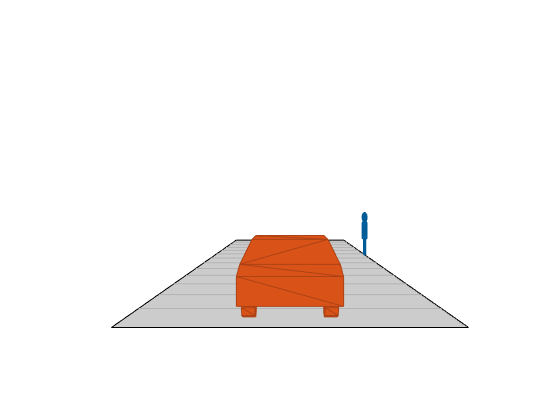
Add an egocentric plot for the vehicle. Turn the display of meshes on.
chasePlot(v,'Meshes','on')
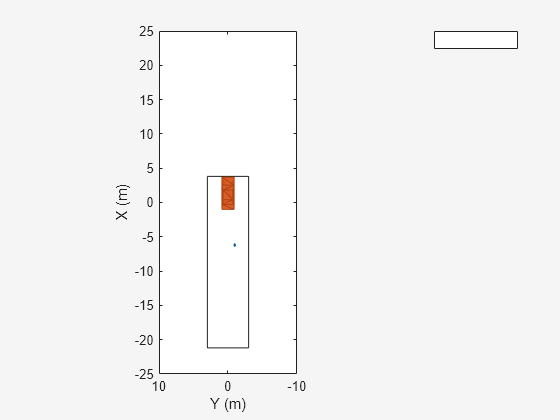
Create a bird's-eye plot in which to display the meshes. Also create a mesh plotter and lane boundary plotter. Then run the simulation loop.
Obtain the road boundaries of the road the vehicle is on.
Obtain the mesh vertices, faces, and colors of the actor meshes, with positions relative to the vehicle.
Plot the road boundaries and actor meshes on the bird's-eye plot.
Pause the scenario to allow time for the plots to update. The chase plot updates every time you advance the scenario.
bep = birdsEyePlot('XLim',[-25 25],'YLim',[-10 10]); mPlotter = meshPlotter(bep); lbPlotter = laneBoundaryPlotter(bep); legend('off') while advance(scenario) rb = roadBoundaries(v); [vertices,faces,colors] = targetMeshes(v); plotLaneBoundary(lbPlotter,rb) plotMesh(mPlotter,vertices,faces,'Color',colors) pause(0.01) end
Input Arguments
More About
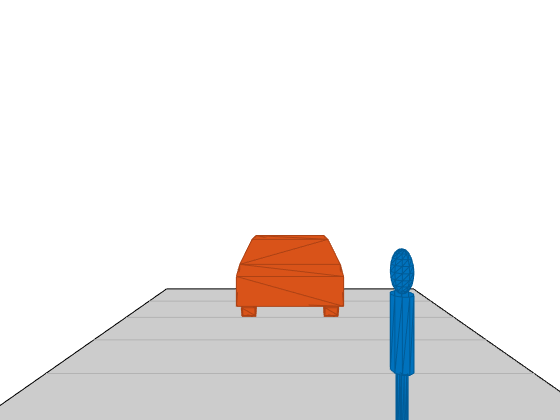
In driving scenarios, a mesh is a triangle-based 3-D representation of an object. Mesh representations of objects are more detailed than the default cuboid (box-shaped) representations of objects. Meshes are useful for generating synthetic point cloud data from a driving scenario.
This table shows the difference between a cuboid representation and a mesh representation of a vehicle in a driving scenario.
| Cuboid | Mesh |
|---|---|
|
|


Version History
Introduced in R2020b