plotPointCloud
Display generated point cloud on bird's-eye plot
Description
plotPointCloud(
displays a point cloud generated from a point cloud data object,
pcPlotter,pcObject)pcObject. The point cloud plotter, pcPlotter, is
associated with a birdsEyePlot object and configures the display
of the specified point cloud.
To remove the point cloud associated with the point cloud plotter, use the clearData
function with pcPlotter specified as the input argument.
plotPointCloud(
specifies the point cloud data as a matrix of 2-D or 3-D points,
pcPlotter,pointCloudMatrix)pointCloudMatrix.
Examples
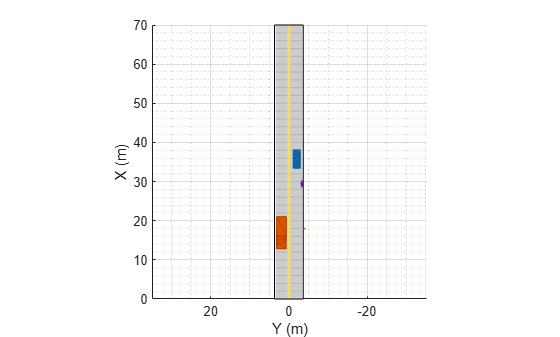
Generate lidar point cloud data for a driving scenario with multiple actors by using the lidarPointCloudGenerator System object. Create the driving scenario by using drivingScenario object. It contains an ego-vehicle, pedestrian and two other vehicles.
Create and plot a driving scenario with multiple vehicles
Create a driving scenario.
scenario = drivingScenario;
Add a straight road to the driving scenario. The road has one lane in each direction.
roadCenters = [0 0 0; 70 0 0];
laneSpecification = lanespec([1 1]);
road(scenario,roadCenters,'Lanes',laneSpecification);Add an ego vehicle to the driving scenario.
egoVehicle = vehicle(scenario,'ClassID',1,'Mesh',driving.scenario.carMesh); waypoints = [1 -2 0; 35 -2 0]; smoothTrajectory(egoVehicle,waypoints,10);
Add a truck, pedestrian, and bicycle to the driving scenario and plot the scenario.
truck = vehicle(scenario,'ClassID',2,'Length', 8.2,'Width',2.5,'Height',3.5, ... 'Mesh',driving.scenario.truckMesh); waypoints = [70 1.7 0; 20 1.9 0]; smoothTrajectory(truck,waypoints,15); pedestrian = actor(scenario,'ClassID',4,'Length',0.24,'Width',0.45,'Height',1.7, ... 'Mesh',driving.scenario.pedestrianMesh); waypoints = [23 -4 0; 10.4 -4 0]; smoothTrajectory(pedestrian,waypoints,1.5); bicycle = actor(scenario,'ClassID',3,'Length',1.7,'Width',0.45,'Height',1.7, ... 'Mesh',driving.scenario.bicycleMesh); waypoints = [12.7 -3.3 0; 49.3 -3.3 0]; smoothTrajectory(bicycle,waypoints,5); plot(scenario,'Meshes','on')
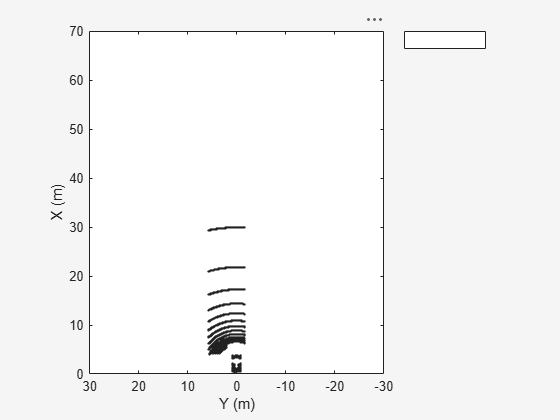
Generate and plot lidar point cloud data
Create a lidarPointCloudGenerator System object.
lidar = lidarPointCloudGenerator;
Add actor profiles and the ego vehicle actor ID from the driving scenario to the System object.
lidar.ActorProfiles = actorProfiles(scenario); lidar.EgoVehicleActorID = egoVehicle.ActorID;
Plot the point cloud data.
bep = birdsEyePlot('Xlimits',[0 70],'YLimits',[-30 30]); plotter = pointCloudPlotter(bep); legend('off'); while advance(scenario) tgts = targetPoses(egoVehicle); rdmesh = roadMesh(egoVehicle); [ptCloud,isValidTime] = lidar(tgts,rdmesh,scenario.SimulationTime); if isValidTime plotPointCloud(plotter,ptCloud); end end
Input Arguments
Version History
Introduced in R2020a
See Also
birdsEyePlot | pointCloudPlotter | findPlotter | clearData | clearPlotterData