assignmunkres
Munkres global nearest neighbor assignment algorithm
Syntax
Description
[
returns a table of assignments,unassignedrows,unassignedcolumns] = assignmunkres(costmatrix,costofnonassignment)assignments of detections to tracks using the
Munkres algorithm. The Munkres algorithm obtains an optimal solution to the global nearest
neighbor (GNN) assignment problem. An optimal solution minimizes the total cost of the
assignments.
The cost of each potential assignment is contained in the cost
matrix, costmatrix. Each matrix entry represents the cost of a possible
assignments. Matrix rows represent tracks and columns represent detections. All possible
assignments are represented in the cost matrix. The lower the cost, the more likely the
assignment is to be made. Each track can be assigned to at most one detection and each detection
can be assigned to at most one track. If the number of rows is greater than the number of
columns, some tracks are unassigned. If the number of columns is greater than the number of
rows, some detections are unassigned. You can set an entry of costmatrix to
Inf to prohibit an assignment.
costofnonassignment represents the cost of leaving tracks or
detections unassigned. Higher values increase the likelihood that every existing object is
assigned.
The function returns a list of unassigned tracks, unassignedrows,
and a list of unassigned detections, unassignedcolumns
Examples
Use assignMunkres to assign three detections to two tracks.
Start with two predicted track locations in x-y coordinates.
tracks = [1,1; 2,2];
Assume three detections are received. At least one detection will not be assigned.
dets = [1.1, 1.1; 2.1, 2.1; 1.5, 3];
Construct a cost matrix by defining the cost of assigning a detection to a track as the Euclidean distance between them. Set the cost of non-assignment to 0.2.
for i = size(tracks, 1):-1:1 delta = dets - tracks(i, :); costMatrix(i, :) = sqrt(sum(delta .^ 2, 2)); end costofnonassignment = 0.2;
Use the Auction algorithm to assign detections to tracks.
[assignments, unassignedTracks, unassignedDetections] = ...
assignmunkres(costMatrix,costofnonassignment);Display the assignments.
disp(assignments)
1 1 2 2
Show that there are no unassigned tracks.
disp(unassignedTracks)
Display the unassigned detections.
disp(unassignedDetections)
3
Plot detection to track assignments.
plot(tracks(:, 1), tracks(:, 2), '*', dets(:, 1), dets(:, 2), 'o') hold on xlim([0, 4]) ylim([0, 4]) legend('tracks', 'detections') assignStr = strsplit(num2str(1:size(assignments,1))); text(tracks(assignments(:, 1),1) + 0.1, ... tracks(assignments(:, 1),2) - 0.1, assignStr); text(dets(assignments(:, 2),1) + 0.1, ... dets(assignments(:, 2),2) - 0.1, assignStr); text(dets(unassignedDetections(:),1) + 0.1, ... dets(unassignedDetections(:),2) + 0.1, 'unassigned');
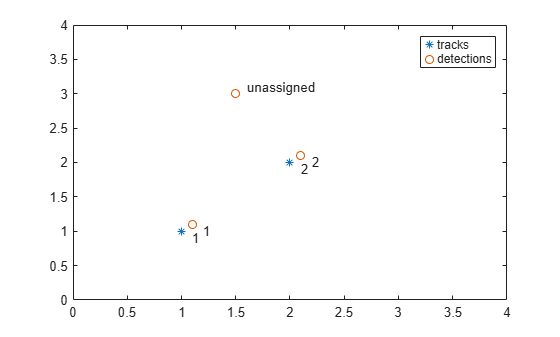
The track to detection assignments are:
Detection 1 is assigned to track 1.
Detection 2 is assigned to track 2.
Detection 3 is not assigned.
Input Arguments
Output Arguments
References
[1] Samuel S. Blackman and Popoli, R. Design and Analysis of Modern Tracking Systems. Artech House: Norwood, MA. 1999.
[2] Miller, M. L., et al. “Optimizing Murty’s Ranked Assignment Method.” IEEE Transactions on Aerospace and Electronic Systems, vol. 33, no. 3, July 1997, pp. 851–62.
[3] Munkres, J., "Algorithms for Assignment and Transportation Problems." Journal of the Society for Industrial and Applied Mathematics Volume 5, Number 1, March, 1957
[4] Pilgrim R. A., "Munkres' Assignment Algorithm Modified for Rectangular Matrices"
Extended Capabilities
Version History
Introduced in R2018b