quaternion
Create quaternion array
Description
A quaternion is a four-part hyper-complex number used in three-dimensional rotations and orientations.
A quaternion number is represented in the form , where a, b, c, and d parts are real numbers, and i, j, and k are the basis elements, satisfying the equation: i2 = j2 = k2 = ijk = −1.
The set of quaternions, denoted by H, is defined within a four-dimensional vector space over the real numbers, R4. Every element of H has a unique representation based on a linear combination of the basis elements, i, j, and k.
All rotations in 3-D can be described by an axis of rotation and angle about that axis. An advantage of quaternions over rotation matrices is that the axis and angle of rotation is easy to interpret. For example, consider a point in R3. To rotate the point, you define an axis of rotation and an angle of rotation.
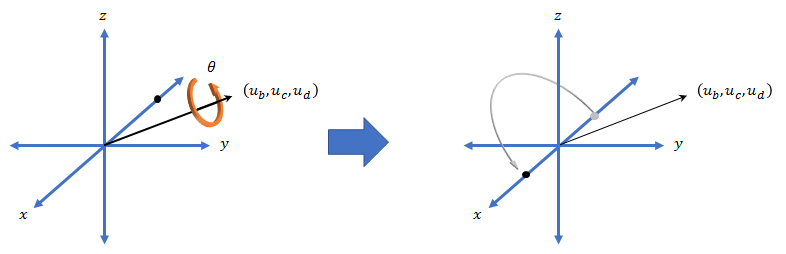
The quaternion representation of the rotation can be expressed as , where θ is the angle of rotation and [ub, uc, and ud] is the axis of rotation.
Creation
Syntax
Description
quat = quaternion()
quat = quaternion(A,B,C,D)A, B, C, and
D. All the inputs must have the same size and be of the
same data type.
quat = quaternion(matrix)
quat = quaternion(RV,"rotvec")RV. Each row of RV represents a
rotation vector in radians.
quat = quaternion(RV,"rotvecd")RV. Each row of RV represents a
rotation vector in degrees.
Input Arguments
Parts of a quaternion, specified as four comma-separated scalars, matrices, or multi-dimensional arrays of the same size.
Example: quat = quaternion(1,2,3,4) creates a
quaternion of the form 1 + 2i + 3j + 4k.
Example: quat = quaternion([1,5],[2,6],[3,7],[4,8])
creates a 1-by-2 quaternion array where quat(1,1) = 1 + 2i + 3j
+ 4k and quat(1,2) = 5 + 6i + 7j +
8k
Data Types: single | double
Matrix of quaternion parts, specified as an N-by-4 matrix. Each row represents a separate quaternion. Each column represents a separate quaternion part.
Example: quat = quaternion(rand(10,4)) creates a
10-by-1 quaternion array.
Data Types: single | double
Matrix of rotation vectors, specified as an N-by-3
matrix. Each row of RV represents the [X Y Z]
elements of a rotation vector. A rotation vector is a unit vector
representing the axis of rotation scaled by the angle of rotation in
radians or degrees.
To use this syntax, specify the first argument as a matrix of rotation
vectors and the second argument as the "rotvec" or
"rotvecd".
Example: quat = quaternion(rand(10,3),"rotvec")
creates a 10-by-1 quaternion array.
Data Types: single | double
Array of rotation matrices, specified by a 3-by-3 matrix or 3-by-3-by-N array. Each page of the array represents a separate rotation matrix.
Example: quat =
quaternion(rand(3),"rotmat","point")
Example: quat =
quaternion(rand(3),"rotmat","frame")
Data Types: single | double
Type of rotation matrix, specified by "point" or
"frame".
Example: quat =
quaternion(rand(3),"rotmat","point")
Example: quat =
quaternion(rand(3),"rotmat","frame")
Data Types: char | string
Matrix of Euler angles, specified by an N-by-3
matrix. If using the "euler" syntax, specify
E in radians. If using the
"eulerd" syntax, specify E
in degrees.
Example: quat =
quaternion(E,"euler","YZY","point")
Example: quat =
quaternion(E,"euler","XYZ","frame")
Data Types: single | double
Rotation sequence, specified as a three-element character vector:
"YZY""YXY""ZYZ""ZXZ""XYX""XZX""XYZ""YZX""ZXY""XZY""ZYX""YXZ"
Assume you want to determine the new coordinates of a point when its coordinate system is rotated using frame rotation. The point is defined in the original coordinate system as:
point = [sqrt(2)/2,sqrt(2)/2,0];
You want to rotate the point using the Euler angle representation [45,45,0]. Rotate the point using two different rotation sequences:
If you create a quaternion rotator and specify the "ZYX" sequence, the frame is first rotated 45° around the z-axis, then 45° around the new y-axis.
quatRotator = quaternion([45,45,0],"eulerd","ZYX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.7071 -0.0000 0.7071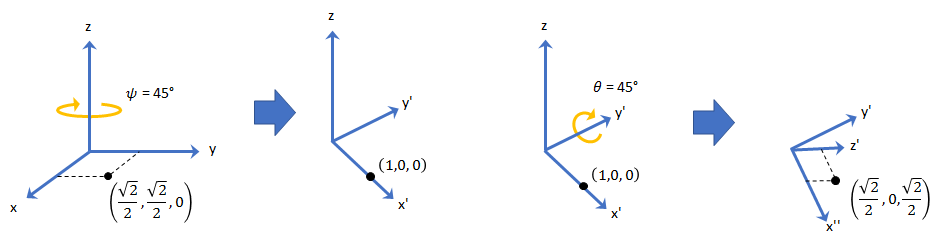
If you create a quaternion rotator and specify the "YZX" sequence, the frame is first rotated 45° around the y-axis, then 45° around the new z-axis.
quatRotator = quaternion([45,45,0],"eulerd","YZX","frame"); newPointCoordinate = rotateframe(quatRotator,point)
newPointCoordinate = 0.8536 0.1464 0.5000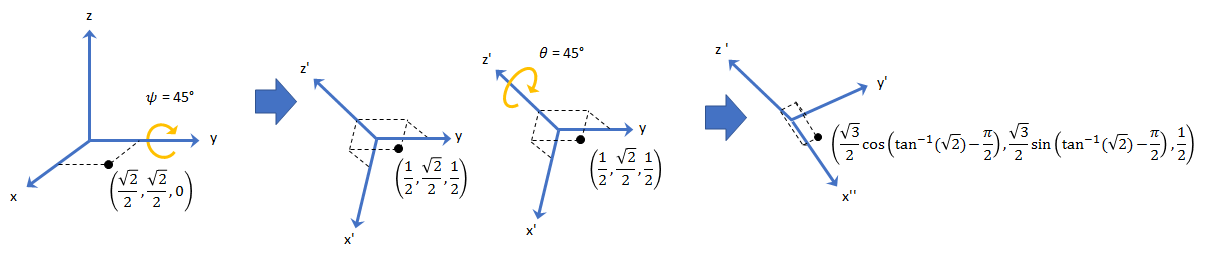
Data Types: char | string
Transformation, specified as an se3 object, or
as an N-element array of se3
objects. N is the total number of
transformations.
The quaternion object ignores the translational
component of the transformation and converts the rotational 3-by-3
submatrix of the transformation to a quaternion.
Orthonormal rotation, specified as an so3 object, or
as an N-element array of so3
objects. N is the total number of rotations.