Track-Oriented Multi-Hypothesis Tracker
Track-Oriented Multi-Hypothesis Tracker
Libraries:
Sensor Fusion and Tracking Toolbox /
Multi-Object Tracking Algorithms
Description
The Track-Oriented Multi-Hypothesis Tracker block processes detections of
multi targets from multiple sensors. The tracker block initializes, confirms, predicts,
corrects, and deletes tracks. Inputs to the tracker block are detection reports generated by
objectDetection, fusionRadarSensor,
irSensor, or
sonarSensor
objects. The tracker block estimates the state vector and state vector covariance matrix for
each track. The tracker assigns detections based on a track-oriented, multi-hypothesis
approach.
Any new track starts in a tentative state. If enough detections are
assigned to a tentative track, its status changes to confirmed. If the
detection already has a known classification (the ObjectClassID field of
the returned track is nonzero), that track is confirmed immediately. When a track is
confirmed, the multi-object tracker considers the track to represent a physical object. If
detections are not assigned to the track within a specifiable number of updates, the track is
deleted. For an overview of how the tracker functions, see Algorithms.
Examples
Track Closely Spaced Targets Under Ambiguity in Simulink
Track objects in Simulink® with Sensor Fusion and Tracking Toolbox™ when the association of sensor detections to tracks is ambiguous. It closely follows the Tracking Closely Spaced Targets Under Ambiguity MATLAB® example.
Ports
Input
Detection list, specified as a Simulink bus containing a MATLAB structure. The structure has the form:
| Field | Description | Type |
|---|---|---|
NumDetections | Number of detections | Integer |
Detections | Object detections | Array of objectDetection structures. The first
NumDetections of these detections are actual
detections. |
The fields of the detections structure are:
| Field | Description | Type |
|---|---|---|
Time | Measurement time | Single or Double |
Measurement | Object measurements | Single or Double |
MeasurementNoise | Measurement noise covariance matrix | Single or Double |
SensorIndex | Unique ID of the sensor | Single or Double |
ObjectClassID | Object classification ID | Single or Double |
MeasurementParameters | Parameters used by initialization functions of tracking filters | Simulink Bus |
ObjectAttributes | Additional information passed to tracker | Simulink Bus |
See objectDetection for a more detailed
explanation of these fields.
Note
The object detection structure contains a Time field. The
time tag of each object detection must be less than or equal to the time at the
current invocation of the block. The time tag must also be greater than the update
time specified in the previous invocation of the block.
Track update time, specified as a real scalar in seconds. The tracker updates all
tracks to this time. The update time must always increase with each invocation of the
block. The update time must be at least as large as the largest
Time specified in the Detections input
port.
If the port is not enabled, the simulation clock managed by Simulink determines the update time.
Dependencies
To enable this port, on the Port Setting tab, set
Prediction time source to Input
port.
Cost matrix, specified as a real-valued N-by-M matrix, where N is the number of branches and M is the number of current detections.
The rows of the cost matrix must be in the same order as the list of branches. Branches are ordered as they appear in the list of branches from the All Branches output port on the previous invocation of the block. The columns correspond to the detections.
In the first update to the tracker, or if the tracker has no previous tracks,
assign the cost matrix a size of [0, N]. The cost must be
calculated so that lower costs indicate a higher likelihood that the tracker assigns a
detection to a track. To prevent certain detections from being assigned to certain
tracks, use Inf.
If this port is not enabled, the filter initialized by the Filter initialization function calculates the cost matrix using the distance method.
Dependencies
To enable this port, on the Port Setting tab, select Enable cost matrix input.
Detectable branch IDs, specified as a real-valued M-by-1 vector or M-by-2 matrix. Detectable branches are branches that the sensors expect to detect. The first column of the matrix contains a list of branch IDs that the sensors report as detectable. The optional second column enables you to add the detection probability for each branch. Branches are listed in the All Branches output from the previous invocation of the block.
Tracks whose identifiers are not included in Detectable BranchIDs are considered undetectable. The track deletion logic does not count the lack of detection as a "missed detection" for track deletion purposes.
If this port is not enabled, the tracker assumes all tracks to be detectable at each invocation of the block.
Dependencies
To enable this port, on the Port Setting tab, select Enable detectable branch IDs input.
Track state parameters, specified as a Simulink bus containing a MATLAB structure. The structure has the form:
| Field | Description |
|---|---|
NumParameters | Number of non-default state parameters, specified as a nonnegative integer |
Parameters | Array of state parameter structures |
The block uses the value of the Parameters field for the
StateParameters field of the generated tracks. You can use
these parameters to define the reference frame in which the track is reported or other
desirable attributes of the generated tracks.
For example, you can use the following structure to define a rectangular reference
frame whose origin position is at [10 10 0] meters and whose origin
velocity is [2 -2 0] meters per second with respect to the scenario
frame.
| Field Name | Value |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
Dependencies
To enable this port, in the Tracker Configuration tab, select the Update track state parameters with time parameter.
Output
Confirmed tracks, returned as a Simulink bus containing a MATLAB structure. The structure has the form:
| Field | Description |
|---|---|
NumTracks | Number of tracks |
Tracks | Array of track structures of a length set by the Maximum number
of tracks parameter. Only the first NumTracks
of these are actual tracks. |
The fields of the track structure are shown in Track Structure.
A track is confirmed if it satisfies the threshold specified in the Confirmation threshold parameter under the Track Logic tab.
Tentative tracks, returned as a Simulink bus containing a MATLAB structure. A track is tentative before it is confirmed.
The fields of the track structure are shown in Track Structure.
Dependencies
To enable this port, on the Port Setting tab, select Enable tentative tracks output.
Combined list of confirmed and tentative tracks, returned as a Simulink bus containing a MATLAB structure.
The fields of the track structure are shown in Track Structure.
Dependencies
To enable this port, on the Port Setting tab, select Enable all tracks output.
Additional information for analyzing track updates, returned as a Simulink bus containing a MATLAB structure.
This table shows the fields of the info structure:
| Field | Description |
OOSMDetectionIndices | Indices of out-of-sequence measurements |
BranchIDsAtStepBeginning | Branch IDs when the update began. |
CostMatrix | Cost of kinematic assignment matrix, in which the (i, j) element denotes the cost of assigning track i to detection j. |
Assignments | Assignments returned from the |
UnassignedTracks | IDs of unassigned branches returned from the tracker. |
UnassignedDetections | IDs of unassigned detections returned from the tracker. |
InitialBranchHistory | Branch history after branching and before pruning. |
InitialBranchScores | Branch scores before pruning. |
KeptBranchHistory | Branch history after initial pruning. |
KeptBranchScores | Branch scores after initial pruning. |
Clusters | Logical array mapping branches to clusters. Branches belong in the same cluster if they share detections in their history or belong to the same track either directly or through other branches. |
TrackIncompatibility | Branch incompatibility matrix. The
|
GlobalHypotheses | Logical matrix mapping branches to global hypotheses. Compatible branches can belong in the same hypotheses. |
GlobalHypScores | Total score of global hypotheses. |
PrunedBranches | Logical array of branches that the |
GlobalBranchProbabilities | Global probability of each branch existing in the global hypotheses. |
BranchesDeletedByPruning | Branches deleted by the tracker. |
BranchIDsAtStepEnd | Branch IDs when the update ended. |
Dependencies
To enable this port, on the Port Setting tab, select Enable information output.
All branches, returned as a Simulink bus containing a MATLAB structure.
The fields of the branch structure are the same as the Track Structure.
Dependencies
To enable this port, on the Port Setting tab, select Enable all branches output.
Parameters
Tracker Management
Unique tracker identifier, specified as a nonnegative integer. This parameter is
passed as the SourceIndex in the tracker outputs, and distinguishes
tracks that come from different trackers in a multiple-tracker system. You must specify
this property as a positive integer to use the track outputs as inputs to a trackFuser object.
Example: 1
Filter initialization function, specified as the name of a filter initialization function. The tracker uses a filter initialization function when creating new tracks.
Sensor Fusion and Tracking Toolbox™ provides many initialization functions that are compatible with this block.
| Initialization Function | Function Definition |
|---|---|
initcvabf | Initialize constant-velocity alpha-beta filter |
initcaabf | Initialize constant-acceleration alpha-beta filter |
initcvekf | Initialize constant-velocity extended Kalman filter. |
initcackf | Initialize constant-acceleration cubature filter. |
initctckf | Initialize constant-turn-rate cubature filter. |
initcvckf | Initialize constant-velocity cubature filter. |
initcapf | Initialize constant-acceleration particle filter. |
initctpf | Initialize constant-turn-rate particle filter. |
initcvpf | Initialize constant-velocity particle filter. |
initcvkf | Initialize constant-velocity linear Kalman filter. |
initcvukf | Initialize constant-velocity unscented Kalman filter. |
initcaekf | Initialize constant-acceleration extended Kalman filter. |
initcakf | Initialize constant-acceleration linear Kalman filter. |
initcaukf | Initialize constant-acceleration unscented Kalman filter. |
initctekf | Initialize constant-turn-rate extended Kalman filter. |
initctukf | Initialize constant-turn-rate unscented Kalman filter. |
initcvmscekf | Initialize constant-velocity modified spherical coordinates extended Kalman filter. |
initrpekf | Initialize constant-velocity range-parametrized extended Kalman filter. |
initapekf | Initialize constant-velocity angle-parametrized extended Kalman filter. |
initekfimm | Initialize tracking IMM filter. |
You can also write your own initialization function. The function must have the following syntax:
filter = filterInitializationFcn(detection)
objectDetection object. The output of this function must be a filter object:
trackingKF, trackingEKF, trackingUKF, trackingCKF,
trackingPF,
trackingMSCEKF, trackingGSF,
trackingIMM,
or trackingABF.To guide you in writing this function, you can examine the details of the supported functions from within MATLAB. For example:
type initcvekfThreshold for assigning detections to tracks, specified as a positive scalar, a
1-by-3 vector of non-decreasing positive values,
[C1,C2,C3],
or a1-by-4 vector of non-decreasing positive values,
[C1,C2,C3,C4].
If specified as a scalar, the specified value, val, will be expanded
to [0.3,0.7,1,Inf]*val. If specified as
[C1,C2,C3],
it will be expanded as
[C1,C2,C3,Inf].
The thresholds control (1) the assignment of a detection to a track, (2) the creation of a new branch from a detection, and (3) the creation of a new branch from an unassigned track. The threshold values must satisfy: C1 <= C2 <= C3<=C4.
C1 defines a distance such that if a track has an assigned detection with lower distance than C1, the track is no longer considered unassigned and does not create an unassigned track branch.
C2 defines a distance such that if a detection has been assigned to a track with lower distance than C2, the detection is no longer considered unassigned and does not create a new track branch.
C3 defines the maximum distance for assigning a detection to a track.
C4 defines combinations of track and detection for which an accurate normalized cost calculation is performed. Initially, the tracker executes a coarse estimation for the normalized distance between all the tracks and detections. The tracker only calculates the accurate normalized distance for the combinations whose coarse normalized distance is less than C4.
See Algorithms for an explanation of the normalized distance.
Increase the value of C3 if there are detections that should be assigned to tracks but are not. Decrease the value if there are detections that are assigned to tracks they should not be assigned to (too far away).
Increasing the values C1 and C2 helps control the number of track branches that are created. However, doing so reduces the number of branches (hypotheses) each track has.
Increase the value of C4 if there are combinations of track and detection that should be calculated for assignment but are not. Decrease it if cost calculation takes too long.
Note
If the value of C4 is finite, the state transition function and measurement function, specified in the tracking filter used in the tracker, must be able to take an M-by-N matrix of states as input and output N predicted states and N measurements, respectively. M is the size of the state. N, the number of states, is an arbitrary nonnegative integer.
Data Types: single | double
Maximum number of tracks that the block can maintain, specified as a positive integer.
Maximum number of sensors that can be connected to the tracker, specified as a
positive integer. MaxNumSensors must be greater than or equal to
the largest value of SensorIndex found in all the detections used to
update the tracker. SensorIndex is one of the properties of an
objectDetection object. The block's
MaxNumSensors property determines how many sets of
ObjectAttributes fields each output track can have.
Out-of-sequence measurements handling, specified as
Terminate or neglect. Each
detection has a timestamp associated with it,
td, and the tracker block has it own
timestamp, tt, which is updated in each
invocation. The tracker block considers a measurement as an OOSM if
td <
tt.
When the parameter is specified as:
Terminate— The block stops running when it encounters any out-of-sequence measurements.Neglect— The block neglects any out-of-sequence measurements and continue to run.
To simulate out-of-sequence detections, use objectDetectionDelay.
Specify the parameters of the track state reference frame as a
structure or a structure array. The block passes the value of this parameter to the
StateParameters field of the generated tracks. You can use these
parameters to define the reference frame in which the track is reported or other desirable
attributes of the generated tracks.
For example, you can use the following structure to define a
rectangular reference frame whose origin position is at
[10 10 0] meters and whose origin
velocity is [2 -2 0] meters per second with
respect to the scenario frame.
| Field Name | Value |
|---|---|
Frame | "Rectangular" |
Position | [10 10 0] |
Velocity | [2 -2 0] |
You can update the track state parameters through the State Parameters input port by selecting the Update track state parameters with time parameter.
Data Types: struct
Select this parameter to enable the input port for track state parameters through the State Parameters input port.
Track output method, specified as 'Tracks',
'Hypothesis', or 'Clusters'.
'Tracks'– Output the centroid of each track based on its track branches.'Hypothesis'– Output branches that are in certain hypotheses. If you choose this option, list the hypotheses to output using theHypothesesToOutputproperty.'Clusters'– Output the centroid of each cluster. Similar to the'Tracks'output, but includes all tracks within a cluster.
Data Types: char
Interpreted execution— Simulate the model using the MATLAB interpreter. This option shortens startup time. In theInterpreted executionmode, you can debug the source code of the block.Code generation— Simulate the model using generated C code. The first time you run a simulation, Simulink generates C code for the block. The C code is reused for subsequent simulations as long as the model does not change. This option requires additional startup time.
Hypotheses Management
Maximum number of global assignment hypotheses maintained by the tracker at each step, specified as a positive integer. If the number of hypotheses is larger than the property value, the tracker prunes the hypotheses of lower likelihoods and its associated branches until the number of hypotheses reaches the property value. Larger values increase the computational load.
Example: 10
Data Types: single | double
Maximum number of track branches allowed for each track, specified as a positive integer. Larger values increase the computational load.
Data Types: single | double
Maximum number of scans maintained in the branch history, specified as a positive integer. The number of track history scans is typically from 2 through 6. Larger values increase the computational load.
Data Types: single | double
Minimum probability required to keep a track branch, specified as a positive scalar less than one. Any track with probability lower than the specified probability is pruned. Typical values are 0.001 to 0.005.
Example: .003
Data Types: single | double
N-scan pruning method, specified as 'None' or
'Hypothesis'. In N-scan pruning, branches that belong to the same
track are pruned (deleted) if, in the N-scans history, they contradict the most likely
branch for the same track. The most-likely branch is defined in one of two ways:
'None'– No N-scan pruning is performed.'Hypothesis'– The chosen branch is in the most likely hypothesis.
Example: 'Hypothesis'
Track Logic
Minimum score required to confirm a track, specified as a positive scalar. Any track with a score higher than this threshold is confirmed.
Example: 12
Data Types: single | double
The maximum score drop before a track is deleted, specified as a scalar. Any track with a score that falls by more than this parameter from the maximum score is deleted. Deletion threshold is affected by the probability of a false alarm.
Example: -1
Data Types: single | double
Probability of detection, specified as a positive scalar between 0 and 1. This property is used to compute track score.
Example: 0.5
Data Types: single | double
The probability of false alarm, specified as a scalar. This property is used to compute track score.
Example: 1e-5
Data Types: single | double
The volume of a sensor measurement bin, specified as a positive scalar. For example, if a radar produces a 4-D measurement, which includes azimuth, elevation, range, and range rate, the 4-D volume is defined by the radar angular beam width, the range bin width, and the range-rate bin width. Volume is used in calculating the track score when initializing and updating a track.
Example: 1.5
Data Types: single | double
The rate of new tracks per unit volume, specified as a positive scalar. The parameter is used in calculating the track score during track initialization.
Example: 2.5
Data Types: single | double
Port Setting
Source for prediction time, specified as Input port or
Auto. Select Input port to input
an update time by using the Prediction Time input port. Otherwise,
the simulation clock managed by Simulink determines the update time.
Select this parameter to enable the input of a cost matrix by using the Cost Matrix input port.
Select this parameter to enable the Detectable branch IDs input port.
Select this parameter to enable the output of tentative tracks through the Tentative Tracks output port.
Select this parameter to enable the output of all the tracks through the All Tracks output port.
Select this parameter to enable the output port for analysis information through the Info output port.
Select this parameter to enable the output of all the branches through the All Branches output port.
Source of the output track bus name, specified as:
Auto— The block automatically creates an output track bus name.Property— Specify the output track bus name by using the Specify an output bus name parameter.
Source of the output info bus name, specified as:
Auto— The block automatically creates an output info bus name.Property— Specify the output info bus name by using the Specify an output info bus name parameter.
Dependencies
To enable this parameter, on the Port Setting tab, select Enable information output.
Algorithms
When you process detections using the tracker, track creation and management follow these steps.
The tracker attempts to assign detections to existing tracks.
The track allows for multiple hypotheses about the assignment of detections to tracks.
Unassigned detections result in the creation of new tracks.
Assignments of detections to tracks create branches for the assigned tracks.
Tracks with no assigned detections are coasted (predicted).
All track branches are scored. Branches with low initial scores are pruned.
Clusters of branches that share detections (incompatible branches) in their history are generated.
Global hypotheses of compatible branches are formulated and scored.
Branches are scored based on their existence in the global hypotheses. Low-scored branches are pruned.
Additional pruning is performed based on N-scan history.
All tracks are corrected and predicted to the input time.
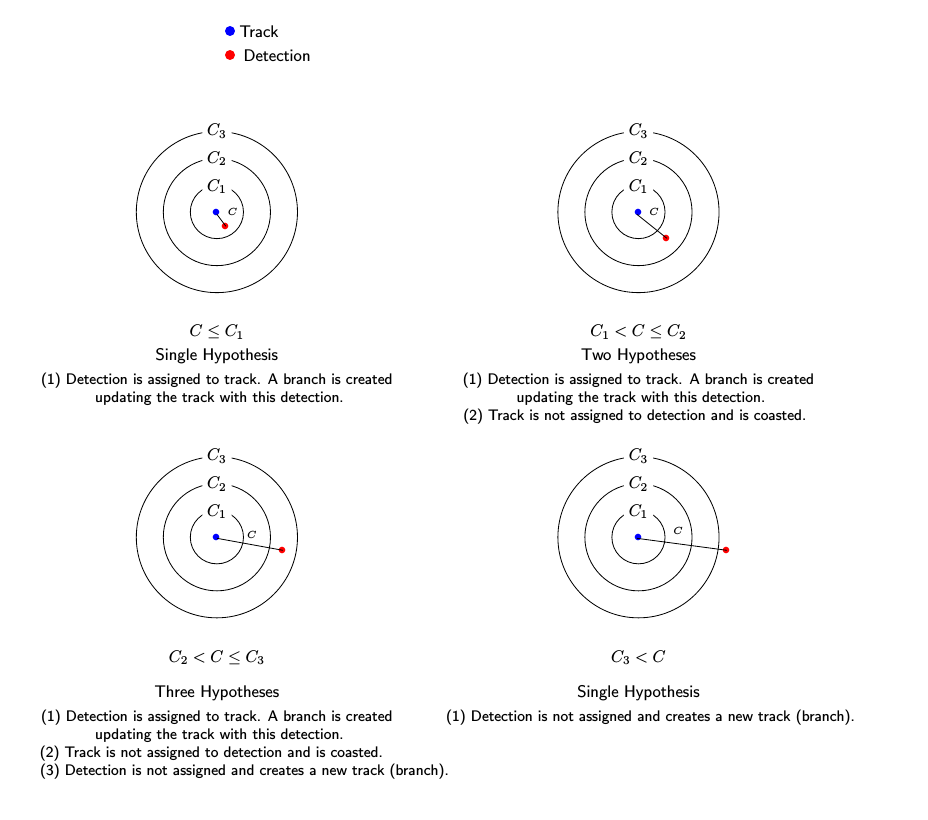
Three assignment thresholds, C1 , C2, and C3, control (1) the assignment of a detection to a track, (2) the creation of a new branch from a detection, and (3) the creation of a new branch from an unassigned track. The threshold values must satisfy: C1 <= C2 <= C3.
If the cost of an assignment is C = costmatrix(i,j), the following
hypotheses are created based on comparing the cost to the values of the assignment
thresholds. Below each comparison, there is a list of the possible hypotheses.
Tips:
Increase the value of C3 if there are detections that should be assigned to tracks but are not. Decrease the value if there are detections that are assigned to tracks they should not be assigned to (too far away).
Increasing the values C1 and C2 helps control the number of track branches that are created. However, doing so reduces the number of branches (hypotheses) each track has.
To allow each track to be unassigned, set C1 = 0.
To allow each detection to be unassigned, set C2 = 0.
All numeric inputs can be single or double precision, but they all must have the same precision.
The fields of a track structure are:
| Field | Definition |
|---|---|
SourceIndex | Unique source index used to distinguish tracking sources in a multiple tracker environment. |
TrackID | Unique track identifier used to distinguish multiple tracks. |
BranchID | Unique track branch identifier used to distinguish multiple track branches. |
UpdateTime | Time at which the track is updated. Units are in seconds. |
Age | Number of times the track survived. |
State | Value of state vector at the update time. |
StateCovariance | Uncertainty covariance matrix. |
TrackLogic | Confirmation and deletion logic type, returned as 'History'
or 'Integrated'. |
TrackLogicState | The current state of the track logic type. Based on the logic type
|
IsConfirmed | Confirmation status. This field is true if the track is
confirmed to be a real target. |
IsCoasted | Coasting status. This field is true if the track is updated
without a new detection. |
IsSelfReported | Indicate if the track is reported by the tracker. This field is used in a
track fusion environment. It is returned as |
ObjectClassID | Integer value representing the object classification. The value
0 represents an unknown classification. Nonzero classifications
apply only to confirmed tracks. |
ObjectAttributes | Additional information of the track. |
References
[1] Werthmann, J. R. "Step-by-Step Description of a Computationally Efficient Version of Multiple Hypothesis Tracking." In International Society for Optics and Photonics, Vol. 1698, pp. 228-301, 1992.
[2] Blackman, S., and R. Popoli. Design and Analysis of Modern Tracking Systems. Artech House Radar Library, Boston, 1999.
Extended Capabilities
In code generation, if the detection inputs are specified in
doubleprecision, then theNumTracksfield of the track outputs is returned as adoublevariable. If the detection inputs are specified insingleprecision, then theNumTracksfield of the track outputs is returned as auint32variable.
Version History
Introduced in R2020aAs of R2023a, the Simulink buses created by this block no longer show in MATLAB workspace.
See Also
Functions
Objects
objectDetection|trackingKF|trackingEKF|trackingUKF|trackingCKF|trackingPF|trackingMSCEKF|trackingGSF|trackingIMM|trackingABF|objectTrack|fusionRadarSensor|sonarSensor|irSensor|trackerGNN
Blocks
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)