Constrained Minimization Using the Genetic Algorithm
This example shows how to minimize an objective function subject to nonlinear inequality constraints and bounds using the Genetic Algorithm.
Constrained Minimization Problem
For this problem, the objective function to minimize is a simple function of a 2-D variable x.
simple_objective(x) = (4 - 2.1*x(1)^2 + x(1)^4/3)*x(1)^2 + x(1)*x(2) + (-4 + 4*x(2)^2)*x(2)^2;
This function is known as "cam," as described in L.C.W. Dixon and G.P. Szego [1].
Additionally, the problem has nonlinear constraints and bounds.
x(1)*x(2) + x(1) - x(2) + 1.5 <= 0 (nonlinear constraint) 10 - x(1)*x(2) <= 0 (nonlinear constraint) 0 <= x(1) <= 1 (bound) 0 <= x(2) <= 13 (bound)
Code the Fitness Function
Create a MATLAB file named simple_objective.m containing the following code:
function y = simple_objective(x) x1 = x(1); x2 = x(2); y = (4-2.1.*x1.^2+x1.^4./3).*x1.^2+x1.*x2+(-4+4.*x2.^2).*x2.^2; end
Solvers such as ga accept a single input x, where x has as many elements as the number of variables in the problem. The objective function computes the scalar value of the objective function and returns it in its single output argument y.
Code the Constraint Function
Create a MATLAB file named simple_constraint.m containing the following code:
function [ineqnonlin,eqnonlin] = simple_constraint(x) ineqnonlin = [1.5 + x(1)*x(2) + x(1) - x(2); -x(1)*x(2) + 10]; % No nonlinear equality constraints: eqnonlin = []; end
The constraint function computes the values of all the inequality and equality constraints and returns the vectors ineqnonlin and eqnonlin, respectively. The value of ineqnonlin represents nonlinear inequality constraints that the solver attempts to make less than or equal to zero. The value of eqnonlin represents nonlinear equality constraints that the solver attempts to make equal to zero. This example has no nonlinear equality constraints, so eqnonlin = []. For details, see Nonlinear Constraints.
Minimizing Using ga
Specify the objective function as a function handle.
ObjectiveFunction = @simple_objective;
Specify the problem bounds.
lb = [0 0]; % Lower bounds ub = [1 13]; % Upper bounds
Specify the nonlinear constraint function as a function handle.
ConstraintFunction = @simple_constraint;
Specify the number of problem variables.
nvars = 2;
Call the solver, requesting the optimal point x and the function value at the optimal point fval.
rng default % For reproducibility [x,fval] = ga(ObjectiveFunction,nvars,[],[],[],[],lb,ub,ConstraintFunction)
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
0.8122 12.3103
fval = 9.1268e+04
Add Visualization
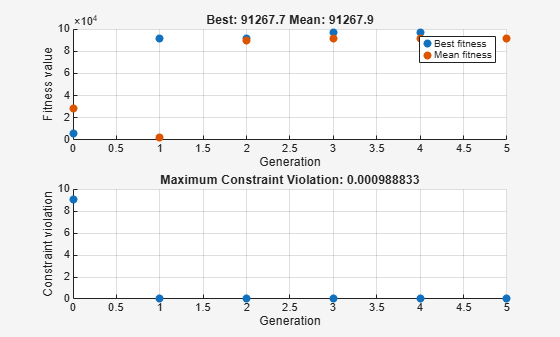
To observe the solver's progress, specify options that select two plot functions. The plot function gaplotbestf plots the best objective function value at every iteration, and the plot function gaplotmaxconstr plots the maximum constraint violation at every iteration. Set these two plot functions in a cell array. Also, display information about the solver's progress in the Command Window by setting the Display option to "iter".
options = optimoptions("ga",PlotFcn={@gaplotbestf,@gaplotmaxconstr}, ... Display="iter");
Run the solver, including the options argument.
rng default % For reproducibility [x,fval] = ga(ObjectiveFunction,nvars,[],[],[],[],lb,ub, ... ConstraintFunction,options)
Single objective optimization:
2 Variables
2 Nonlinear inequality constraints
Options:
CreationFcn: @gacreationuniform
CrossoverFcn: @crossoverscattered
SelectionFcn: @selectionstochunif
MutationFcn: @mutationadaptfeasible
Best Max Stall
Generation Func-count f(x) Constraint Generations
1 2520 91325.4 0.0006257 0
2 4982 91324.1 5.733e-05 0
3 8008 96674.7 0 0
4 13901 97089.2 0 0
5 17244 91267.7 0.0009888 0
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
0.8122 12.3103
fval = 9.1268e+04
With iterative display, that ga provides details about the problem type and the creation, crossover, mutation, and selection operators.
Nonlinear constraints cause ga to solve many subproblems at each iteration. As shown in both the plots and the iterative display, the solution process has few iterations. However, the Func-count column in the iterative display shows many function evaluations per iteration.
The ga solver handles linear constraints and bounds differently from nonlinear constraints. All the linear constraints and bounds are satisfied throughout the optimization. However, ga may not satisfy all the nonlinear constraints at every generation. If ga converges to a solution, the nonlinear constraints will be satisfied at that solution.
ga uses the mutation and crossover functions to produce new individuals at every generation. The way the ga satisfies the linear and bound constraints is to use mutation and crossover functions that only generate feasible points. For example, in the previous call to ga, the default mutation function (for unconstrained problems) mutationgaussian does not satisfy the linear constraints and so ga uses the mutationadaptfeasible function instead by default. If you provide a custom mutation function, this custom function must only generate points that are feasible with respect to the linear and bound constraints. All the crossover functions in the toolbox generate points that satisfy the linear constraints and bounds.
However, when your problem contains integer constraints, ga enforces that all iterations satisfy bounds and linear constraints. This feasibility occurs for all mutation, crossover, and creation operators, to within a small tolerance.
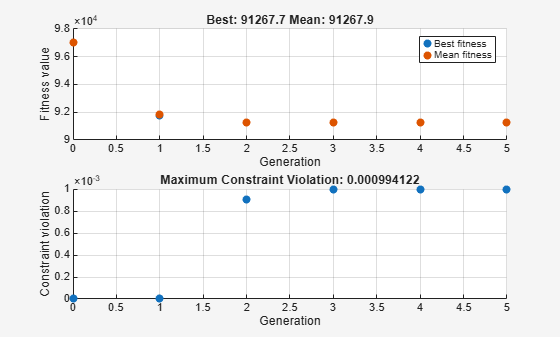
Provide a Start Point
To speed the solver, you can provide an initial population in the InitialPopulationMatrix option. ga uses the initial population to start its optimization. Specify a row vector or a matrix where each row represents one start point.
X0 = [0.8 12.5]; % Start point (row vector) options.InitialPopulationMatrix = X0; rng default % For reproducibility [x,fval] = ga(ObjectiveFunction,nvars,[],[],[],[],lb,ub, ... ConstraintFunction,options)
Single objective optimization:
2 Variables
2 Nonlinear inequality constraints
Options:
CreationFcn: @gacreationuniform
CrossoverFcn: @crossoverscattered
SelectionFcn: @selectionstochunif
MutationFcn: @mutationadaptfeasible
Best Max Stall
Generation Func-count f(x) Constraint Generations
1 2500 91798.8 0 0
2 4950 91274.7 0.0009068 0
3 7400 91267.7 0.0009941 0
4 9850 91267.7 0.0009941 1
5 12300 91267.7 0.0009941 2
Optimization finished: average change in the fitness value less than options.FunctionTolerance and constraint violation is less than options.ConstraintTolerance.
x = 1×2
0.8122 12.3103
fval = 9.1268e+04
In this case, providing a start point does not substantially change the solver progress.
References
[1] Dixon, L. C. W., and G .P. Szego (eds.). Towards Global Optimisation 2. North-Holland: Elsevier Science Ltd., Amsterdam, 1978.