Double-Acting Actuator (IL-PB)
Libraries:
Simscape /
Fluids /
Isothermal Liquid /
Actuators
Description
The Double-Acting Actuator (IL-PB) block models the linear conversion of a pressure differential between two chambers to piston motion. The pressure differential that acts on the piston plate that separates the chambers controls the piston actuation. A hard stop limits the motion of the piston when it is near full extension or full retraction. You can model fluid compressibility in either piston chambers.
Ports Af and Bf are isothermal liquid inlets that control the pressure in both chambers. The block converts the pressure differential between the two chambers to a translation force at either port B or F. The Modeling option parameter controls whether port B or F connects to the piston.
Hard Stop Model
The block has three different options for the hard stop that you can use to model the extension limit of the actuator piston. For more information on the hard stop model options, see Translational Hard Stop (PB).
The block models the hard stop when the piston is at its upper or lower bound. Outside of this region,
Cushion
The block can model cushioning toward the extremes of the piston stroke. Select Enable cylinder Af end cushioning or Enable cylinder Bf end cushioning to slow the piston motion as it approaches the end cap. For more information on the functionality of a cylinder cushion, see the Cylinder Cushion (IL-PB) block.
Friction
The block can model friction against piston motion. When you select Enable cylinder friction effect, the friction is a combination of the Stribeck, Coulomb, and viscous effects. The block measures the pressure difference between the chamber pressure and the environment pressure. For more information on the friction model and its limitations, see the Cylinder Friction (IL-PB) block.
Numerically-Smoothed Area and Pressure
You can maintain numerical robustness in your simulation by adjusting the Smoothing factor parameter. If the Smoothing factor parameter is nonzero, the block smooths the cushion A and B orifice areas and the check valve pressure ranges. The orifice area is smoothly saturated between the cushion A and cushion B Leakage area between plunger and cushion sleeve and Cushion plunger cross-sectional area parameters while the valve pressure is saturated between the cushion A and cushion B Check valve cracking pressure differential and Check valve maximum pressure differential parameters. For more information, see Numerical Smoothing.
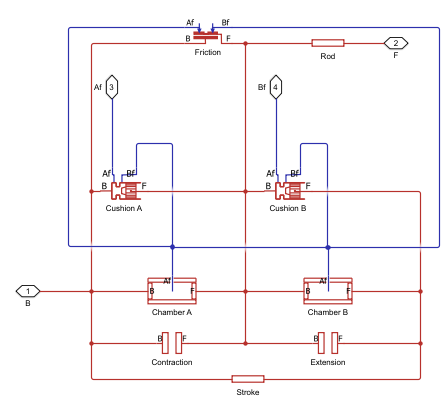
Block Sub-Components
The Single-Acting Actuator (IL-B) block is a composite component made from these Simscape Foundation and Fluids library blocks:
This figure shows the composite diagram when you set Modeling
option to Port F connected to piston and
you select Enable cylinder Af end cushioning, Enable
cylinder Bf end cushioning, and Enable cylinder friction
effect.
Ports
Conserving
Output
Parameters
Extended Capabilities
Version History
Introduced in R2026a