initialCondition
Initial condition representation for linear time-invariant systems
Description
An initialCondition object encapsulates the initial-condition
information for a linear time-invariant (LTI) model. The object generalizes the numeric vector
representation of the initial states of a state-space model so that the information applies to
linear models of any form—transfer functions, polynomial models, or state-space models.
You can estimate and retrieve initial conditions when you identify a linear model using
commands such as tfest or compare model response to measured
input/output data using compare. The software estimates the initial
condition value by minimizing the simulation or prediction error against the measured output
data. You can then apply those initial conditions in a subsequent simulation, using commands
such as sim or predict, to confirm model performance with respect to the same measurement data.
Use the initialCondition command to create an
initialCondition object from a state-space model specification or from any
LTI model of a free response.
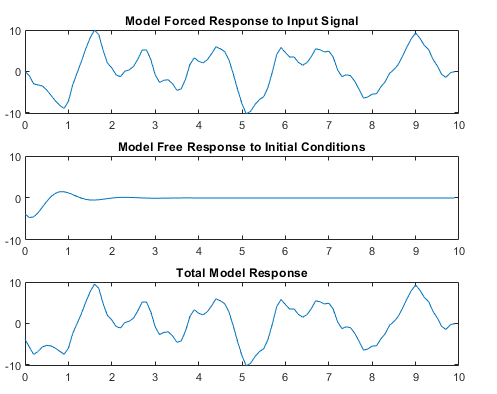
The initialCondition object can also be seen as a representation of the
free response of a linear model. The simulation functions use this information to compute the
model response in the following manner:
Compute the forced response of the model to the input signal. The forced response is the standard simulation output when there are no specified initial conditions.
Compute the impulse response of the model and scale the result to generate the free response of the model to the specified initial conditions.
Add the forced response and the free response together to form the total system response.
The figure illustrates this process.
For continuous systems (Ts = 0), the free response G(s) for the initial state vector x0 is
Here, C is equivalent to the state-space measurement matrix C and A is equivalent to the state-space state matrix A.
For discrete systems (Ts >0), the free response G(z) is
The initialCondition object represents the free response in state-space
form. The object is a structure with properties containing the state-space
A and C matrices and the initial state vector
x0. For idtf and
idpoly models, using an initialCondition object is the
only way to represent and use initial conditions for simulation. For idss
models, you can use either an initialCondition object or a numeric initial
state vector. When you obtain initial conditions ic for multiexperiment
data, ic is an object array, with one initialCondition
object for each experiment.
Creation
You can obtain an initialCondition object in one of four ways.
Model estimation — Specify that the estimation function return the estimated initial condition that corresponds to the estimation input/output data. For example, you can use the following command to obtain the estimated initial condition
icfor a transfer function modelsysthat is estimated with input/output dataz.For an example, see Obtain Estimated Initial Conditions.[sys,ic] = tfest(z,2,1)
Model-to-data comparison using any input/output data — Specify that
comparereturn the estimated initial condition that the function estimates internally to support thefitassessment. For example, you can use the following command to obtain the initial conditionicfor the linear modelsyswhen determining the fit against input/output dataz.ypis the simulated or predicted model output.For an example, see Obtain Initial Conditions for New Data.[yp,fit,ic] = compare(z,sys)
Direct construction — Use the
initialConditioncommand to encapsulate the state-space form of a free-response model in aninitialConditionobject.For an example, see Construct initialCondition Object from State-Space Model.ic = initialCondition(A,X0,C,Ts)
Free-response model conversion — Use the
initialConditioncommand to convert an LTI free-response model into aninitialConditionobject.ic = initialCondition(G)
For an example, see Convert Free-Response Model to initialCondition Object.
For information on functions you can use to extract information from or transform
initialCondition objects, see Object Functions.
Description
ic = initialCondition(A,X0,C,Ts)initialCondition object that represents the free response to an initial
condition, expressed in state-space form, of an LTI model.
ic stores this model in the form of properties.
A and C correspond to a state-space realization of the model, X0 to the initial state vector x0,
and Ts to the sample time. You can use ic to specify
initial conditions when simulating any type of LTI system.
Input Arguments
Properties
Object Functions
Functions applicable to initialCondition objects are those that can
return, use, or convert the objects.
| Initial Condition (IC) Role | LTI Function Type | Syntax Example | Example Links |
|---|---|---|---|
| Return estimated IC objects | All estimation functions, compare | [sys,ic] = tfest(data,2,1) | Obtain Estimated Initial Conditions |
| Use IC objects for model response | Option sets for model response functions | opt = simOptions('InitialCondition',ic) | Apply Initial Conditions in Simulation |
| Convert IC objects into Dynamic System Models (DSMs) | DSM object functions | g = idtf(ic) | Visualize Free Response to Initial Condition |
| Analyze models converted from IC objects | DSM analysis functions | y_g = impulse(g) | Visualize Free Response to Initial Condition |
Examples
Estimate a transfer function model and obtain estimated initial conditions.
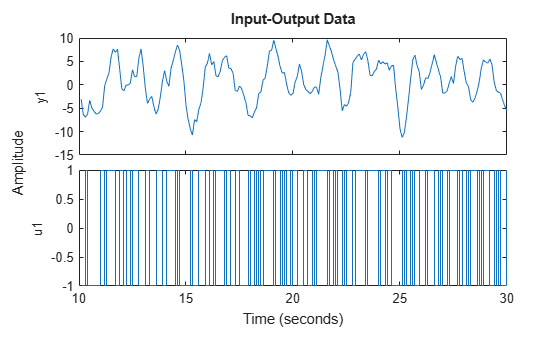
Load and plot the data.
load iddata1ic.mat z1i plot(z1i)
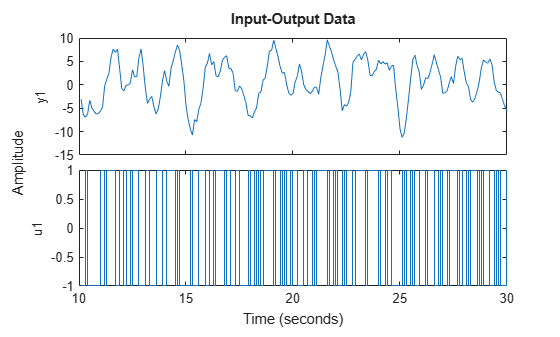
The output data does not start at 0.
Estimate a second-order transfer function sys_tf. Specify that the function return the initial conditions ic.
[sys_tf,ic] = tfest(z1i,2,1);
Examine the contents of ic. ic includes, in state-space form, the free response model defined by matrices A and C, the initial state vector X0, and the sample time Ts.
A = ic.A
A = 2×2
-2.9841 -5.5848
4.0000 0
C = ic.C
C = 1×2
0.2957 5.2441
x0 = ic.X0
x0 = 2×1
-0.9019
-0.6161
Ts = ic.Ts
Ts = 0
ic is specific to the estimation data z1i. You can use ic to establish initial conditions when you simulate any LTI model using the input signal from z1i and compare the response with the z1i output signal.
Visualize the free response encapsulated in an initialCondition object by generating an impulse response.
Estimate a transfer function and return the initial condition ic_tf.
load iddata1ic z1i [sys_tf,ic_tf] = tfest(z1i,2,1); ic_tf
ic_tf =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [0.2957 5.2441]
Ts: 0
ic_tf contains the information necessary to compute the free response to an initial condition.
Convert ic_tf into an idss object that can be passed to the impulse function.
ic_tfss = idss(ic_tf);
Create a time vector t that spans the data set. Compute the impulse response.
t = 0:0.1:9.9;
t = t';
yimp = impulse(ic_tfss,t);
plot(t,yimp)
title('Free Response to Initial Condition')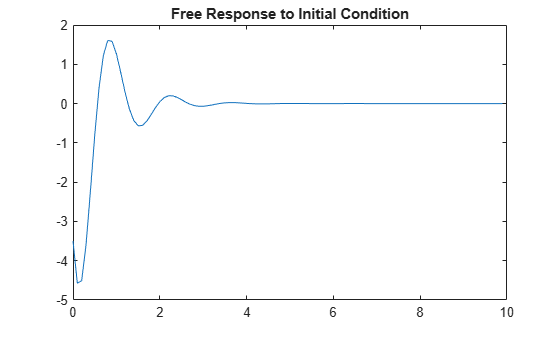
The free response is a transient that lasts for about four seconds.
Load the data and estimate a second-order transfer function sys. Return initial conditions in ic.
load iddata1ic z1i [sys,ic] = tfest(z1i,2,1);
Simulate sys using the estimation data, but without incorporating the initial condition. Plot the simulated output with the measured output.
y_no_ic = sim(sys,z1i); y_no_ic.Name = 'Model'; z1i.Name = 'Measured'; plot(y_no_ic,z1i) legend show
The measured and simulated outputs do not agree at the beginning of the simulation.
Incorporate ic into the simOptions option set opt. Simulate and plot the model response using opt.
opt = simOptions('InitialCondition',ic);
y_ic = sim(sys,z1i,opt);
plot(y_ic,z1i);
legend show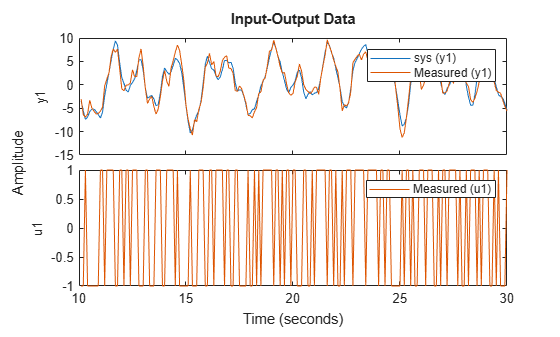
The simulation combines the model response to the input signal with the free response to the initial condition. The measured and simulated outputs now have better agreement at the beginning of the simulation.
An estimated initialCondition object is specific to the data from which you estimated it. If you want to simulate your model with new data, such as validation data, you need to estimate a new initial condition for that data. To do so, use the compare command.
Load data and split it into estimation and validation data sets.
load iddata1 z1 z1_est = z1(1:150); z1_val = z1(151:300); plot(z1_est,z1_val); legend('Estimation Data','Validation Data')
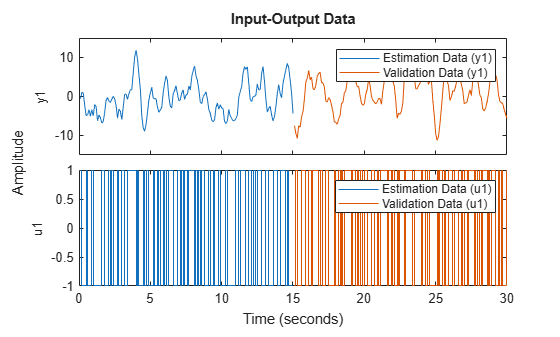
Examine the start points of each output data set.
e0 = z1_est.y(1)
e0 = -0.5872
v0 = z1_val.y(1)
v0 = -7.4390
The two data sets have different starting conditions.
Estimate a second-order transfer function model using z1_est. Return the estimated initial conditions in ic_est. Display the X0 property of ic_est. This property represents the estimated initial state vector that the free-response model defined by ic_est.A and ic_est.C responds to.
[sys,ic_est] = tfest(z1_est,2,1); ic_est.X0
ans = 2×1
-0.4082
0.0095
You can use ic_est if you want to simulate sys using z1_est. Alternatively, you can use compare, which estimates the initial condition independently. Use compare twice, once to plot the data and once to return the results. Display the initial state vector ic_estc.X0 that compare estimates.
compare(z1_est,sys)
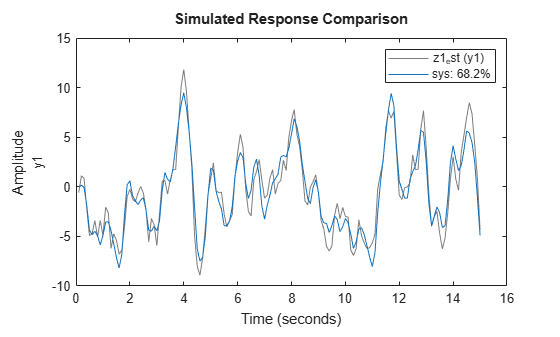
[yce,fit,ic_estc] = compare(z1_est,sys); ic_estc.X0
ans = 2×1
-0.4082
0.0095
The initial state vector ic_estc.X0 is identical to ic_est.
Now evaluate the model with the validation data set. Estimate the initial conditions with the validation data.
compare(z1_val,sys)
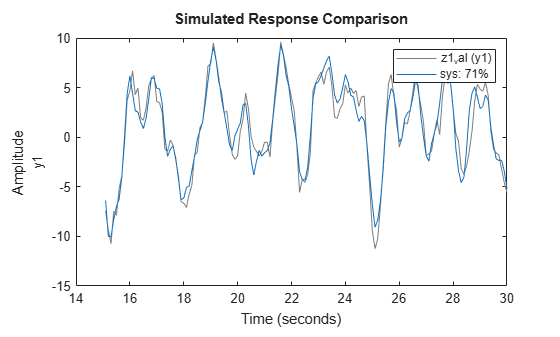
[ycv,fit,ic_valc] = compare(z1_val,sys); ic_valc.X0
ans = 2×1
-1.7536
-0.9547
You can use ic_val when you simulate sys with the z1_val input signal and compare the model response to the z1_val output signal.
Estimate an initialCondition object array using multiexperiment data.
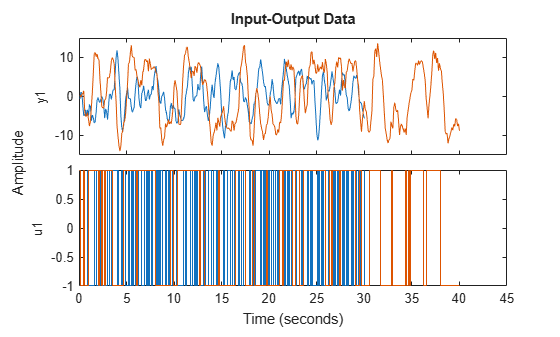
Load data from two experiments. Merge the two data sets into one multiexperiment data set.
load iddata1 z1 load iddata2 z2 z12 = merge(z1,z2)
z12 =
Time domain data set containing 2 experiments.
Experiment Samples Sample Time
Exp1 300 0.1
Exp2 400 0.1
Outputs Unit (if specified)
y1
Inputs Unit (if specified)
u1
Data Properties
plot(z12)
Estimate the second-order transfer function sys and return the initial conditions in ic.
np = 2; nz = 1; [sys,ic] = tfest(z12,np,nz); ic
ic=1×2 initialCondition array with properties:
A
X0
C
Ts
ic is an object array. Display the contents of each object.
ic(1,1)
ans =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [-0.7814 5.2530]
Ts: 0
ic(1,2)
ans =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [-0.7814 5.2530]
Ts: 0
Compare the A, X0, and C properties for each object.
A1 = ic(1,1).A
A1 = 2×2
-3.4824 -5.5785
4.0000 0
A2 = ic(1,2).A
A2 = 2×2
-3.4824 -5.5785
4.0000 0
C1 = ic(1,1).C
C1 = 1×2
-0.7814 5.2530
C2 = ic(1,2).C
C2 = 1×2
-0.7814 5.2530
X01 =ic(1,1).X0
X01 = 2×1
-0.6528
-0.0067
X02 =ic(1,2).X0
X02 = 2×1
0.3076
-0.0715
The A and C matrices are identical. These matrices represent the state-space form of sys. The X0 vectors are different. This difference results from the different initial conditions for the two experiments.
Estimate a state-space model and return the initial states. From the model and the initial state vector, construct an initialCondition object that can be used with any linear model.
Load and plot the data.
load iddata1ic z1i plot(z1i)
Estimate a state-space model and obtain the estimated initial conditions.
First, set the 'InitialState' name-value pair argument in ssestOptions to 'estimate', which overrides the default setting of 'auto'. The 'estimate' setting always estimates the initial states. The 'auto' setting uses the 'zero' setting if the effect of the initial states on the overall model estimation error is relatively small, and can therefore result in an initial-state vector containing only zeros.
opt = ssestOptions; opt = ssestOptions('InitialState','estimate');
Estimate a second-order state-space model sys_ss. Specify the output argument x0 to return the initial state vector. Specify the input argument opt to use your 'InitialState' setting. After estimating, examine x0.
[sys_ss,x0] = ssest(z1i,2,opt); x0
x0 = 2×1
0.0631
0.0329
x0 is a nonzero initial state vector.
Simulate the model using x0 and compare the output with the original output data.
To use x0 as the initial condition, specify the 'InitialCondition' name-value pair argument in simOptions as x0.
opt = simOptions;
opt = simOptions('InitialCondition',x0);Simulate the model using opt and store the response in xss.
xss = sim(sys_ss,z1i,opt);
Plot the model response with the original output data.
t = 0:0.1:19.9; plot(t',[xss.y z1i.y]) legend('ss model','output data') title('Simulated State-Space Model Using Estimated Initial States')
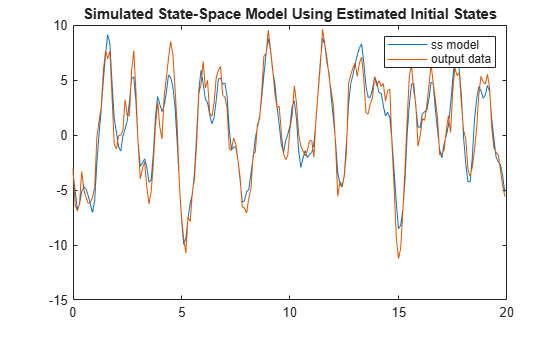
The simulation starts at a point close to the starting point of the data.
With the A and C matrices, x0, and the sample time Ts from sys_ss, construct an initialCondition object ic that you can use with a transfer function model.
A = sys_ss.A; C = sys_ss.C; Ts = sys_ss.Ts; ic = initialCondition(A,x0,C,Ts)
ic =
initialCondition with properties:
A: [2×2 double]
X0: [2×1 double]
C: [-61.3674 13.4811]
Ts: 0
Estimate a transfer function model and simulate the model using ic as the initial condition. Store the response in xtf.
sys_tf = tfest(z1i,2,1);
opt = simOptions('InitialCondition',ic);
xtf = sim(sys_tf,z1i,opt);Plot the model responses xss and xtf together.
plot(t',[xss.y xtf.y]) legend('ss model','tf model') title('Simulated SS and TF Models with Equivalent Initial Conditions')
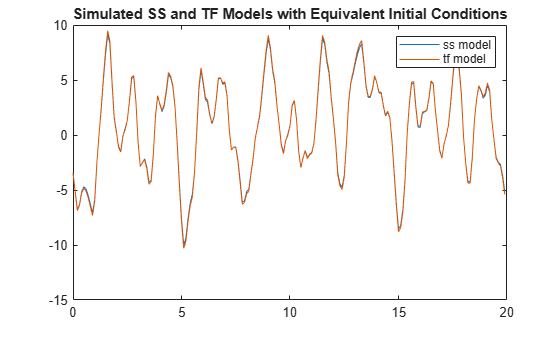
The models track each other closely throughout the simulation.
Obtain the initial conditions when estimating a transfer function model. Convert the initialCondition into a free-response model, and the free-response model back into an initialCondition object.
Load the data and estimate a transfer function model sys. Obtain the estimated initial conditions ic.
load iddata1ic.mat z1i [sys,ic] = tfest(z1i,2,1);
Convert ic into the idtf free-response model g.
g = idtf(ic);
Plot the impulse response of g.
impulse(g)
title('Impulse Response of g')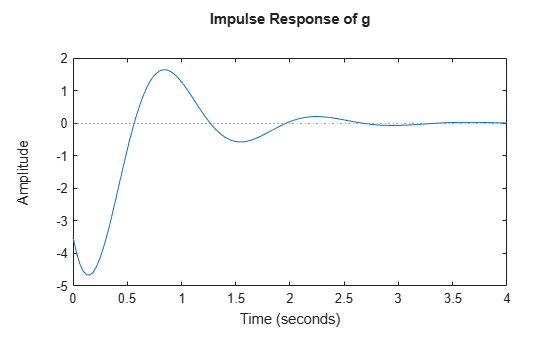
Convert g back into the initialCondition object ic1.
ic1 = initialCondition(g);
Plot the impulse response of ic1 by converting ic1 into an idss model.
impulse(idss(ic1))
title('Impulse Response of ic1 in idss form')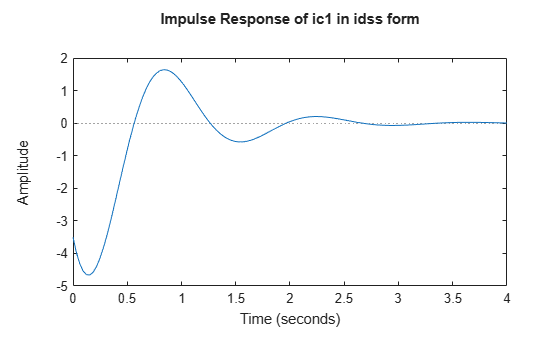
The impulse responses appear identical.
Compare ic and ic1.
ic.A
ans = 2×2
-2.9841 -5.5848
4.0000 0
ic1.A
ans = 2×2
-2.9841 -5.5848
4.0000 0
ic.X0
ans = 2×1
-0.9019
-0.6161
ic1.X0
ans = 2×1
4
0
ic.C
ans = 1×2
0.2957 5.2441
ic1.C
ans = 1×2
-0.8745 -1.7215
The A matrices of ic and ic1 are identical. The C matrix and the X0 vector are different. There are infinitely many state-space representations possible for a given linear model. The two objects are equivalent, as illustrated by the impulse responses.
Version History
Introduced in R2020b