Nonlinear ARX Model
Simulate nonlinear ARX model in Simulink software
Libraries:
System Identification Toolbox /
Models
Description
The Nonlinear ARX Model block simulates the output of a nonlinear ARX
model using time-domain input data. The model is an idnlarx model that you previously estimated or constructed in the
MATLAB® workspace. You specify initial conditions for the simulation as either
steady-state input and output signal levels or as an initial state vector.
Examples
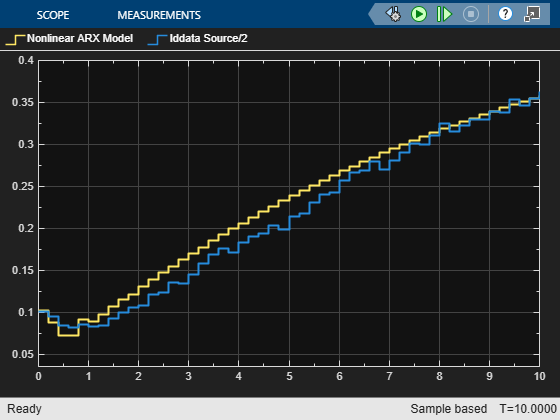
Simulate Nonlinear ARX Model in Simulink
Compare the simulated output of a Nonlinear ARX Model block to the measured output of a system. You improve the agreement between the measured and simulated responses by estimating initial state values.
Limitations
This block does not support model referencing or model protection.
Ports
Input
Output
Parameters
Extended Capabilities
Version History
Introduced in R2008a