detectTarget
Syntax
Description
Add-On Required: This feature requires the Hyperspectral Imaging Library for Image Processing Toolbox add-on.
You can use the detectTarget function for applications such as
airplane detection, mineral identification, and so on. The detectTarget
function supports various target detection techniques. Target detection techniques can be more
useful than spectral matching techniques if the spectral differences between the target and
other regions are very subtle, or if the background clutter in the image is complex or
heterogeneous.
score = detectTarget(spcube,target,method,numEndmember=numEndmembers)
Note
The Hyperspectral Imaging Library for Image Processing Toolbox™ requires desktop MATLAB®, as MATLAB Online™ and MATLAB Mobile™ do not support the library.
Examples
Load a hyperspectral image into the workspace.
hcube = imhypercube("paviaU.dat");Colorize the hyperspectral image to get an RGB image.
rgbImg = colorize(hcube,Method="rgb",ContrastStretching=true);Normalize the hyperspectral image by removing its continuum.
continuumRemovedCube = removeContinuum(hcube);
To detect the roof in the hyperspectral image, specify one pixel in the roof region and extract its spectral signature to use as your target.
continuumRemovedDataCube = gather(continuumRemovedCube); target = squeeze(continuumRemovedDataCube(170,133,:));
Compute the target detection scores of the hyperspectral image pixels with respect to the selected target.
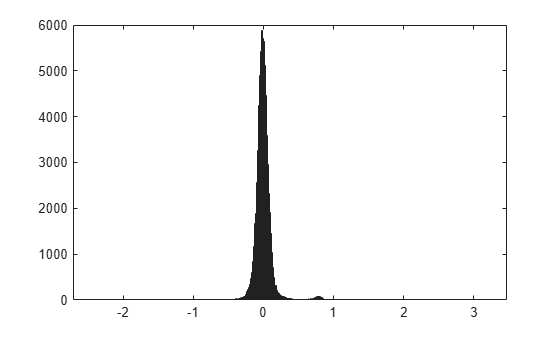
score = detectTarget(continuumRemovedCube,target,"MF");Visualize the histogram of the score image of the target detection. Observe that the histogram has two peaks. Specify a threshold of 0.5, between the two histogram peaks, for classifying whether each pixel contains the target. A true value, representing a pixel with a target detection score greater than 0.5 in the target detection image, indicates that the target is present in that pixel, and a false value indicates that the target is not present.
figure histogram(score)
threshold = 0.5; targetImg = score > threshold;
Load the ground truth target detection image.
load("paviauRoofingGT.mat")
gtImg = paviauRoofingGT;Visualize the RGB image of the hyperspectral image, the ground truth target detection image, and the computed target detection image.
figure tiledlayout(1,3) nexttile imagesc(rgbImg) title("RGB Image") nexttile imagesc(gtImg) title("Ground Truth") nexttile imagesc(targetImg) title("Detected Target")
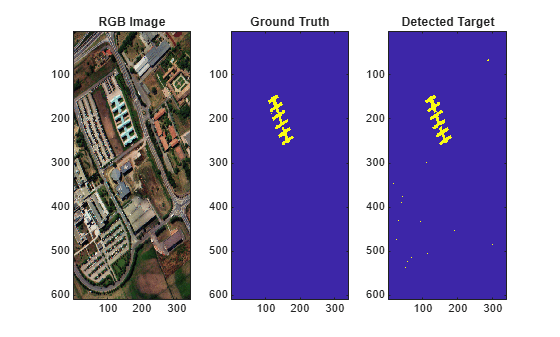
Compute the Dice similarity between the ground truth and computed target detection images.
similarity = dice(targetImg,gtImg)
similarity = 0.9368
Input Arguments
Output Arguments
References
[1] Nasrabadi, Nasser M. “Hyperspectral Target Detection : An Overview of Current and Future Challenges.” IEEE Signal Processing Magazine 31, no. 1 (January 2014): 34–44. https://doi.org/10.1109/MSP.2013.2278992.
[2] Du, Qian, Hsuan Ren, and Chein-I Chang. “A Comparative Study for Orthogonal Subspace Projection and Constrained Energy Minimization.” IEEE Transactions on Geoscience and Remote Sensing 41, no. 6 (June 2003): 1525–29. https://doi.org/10.1109/TGRS.2003.813704.
[3] Jin, Xiaoying, Scott Paswaters, and Harold Cline. “A Comparative Study of Target Detection Algorithms for Hyperspectral Imagery.” In Proceedings of the SPIE 7334, Algorithms and Technologies for Multispectral, Hyperspectral, and Ultraspectral Imagery XV, 73341W (April 2009): 682–93. https://doi.org/10.1117/12.818790.
[4] Ayoub, T.F., and A.R. Haimovich. “Modified GLRT Signal Detection Algorithm.” IEEE Transactions on Aerospace and Electronic Systems 36, no. 3 (July 2000): 810–18. https://doi.org/10.1109/7.869498.
[5] Broadwater, J., R. Meth, and R. Chellappa. “A Hybrid Algorithm for Subpixel Detection in Hyperspectral Imagery.” In 2004 IEEE International Geoscience and Remote Sensing Symposium, vol. 3 (September 2004): 1601–4. https://doi.org/10.1109/IGARSS.2004.1370633.