imnlmfilt
Non-local means filtering of image
Description
J = imnlmfilt(I,Name,Value)
Examples
Read a grayscale image.
I = imread('cameraman.tif');Add zero-mean white Gaussian noise with 0.0015 variance to the image using the imnoise function.
noisyImage = imnoise(I,'gaussian',0,0.0015);Remove noise from the image through non-local means filtering. The imnlmfilt function estimates the degree of smoothing based on the standard deviation of noise in the image.
[filteredImage,estDoS] = imnlmfilt(noisyImage);
Display the noisy image (left) and the non-local means filtered image (right) as a montage. Display the estimated degree of smoothing, estDoS, in the figure title.
The non-local means filter removes noise from the input image but preserves the sharpness of strong edges, such as the silhouette of the man and buildings. This function also smooths textured regions, such as the grass in the foreground of the image, resulting in less detail when compared to the noisy image.
montage({noisyImage,filteredImage})
title(['Estimated Degree of Smoothing, ', 'estDoS = ',num2str(estDoS)])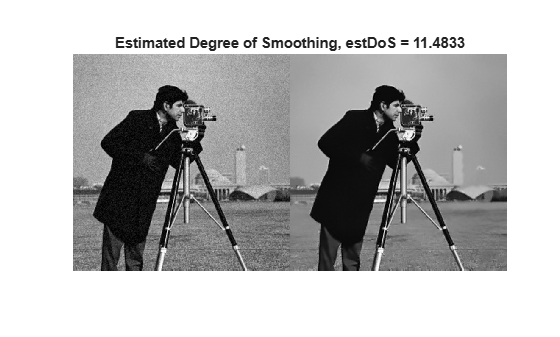
Read a color image.
imRGB = imread('peppers.png');Add white Gaussian noise with zero mean and 0.0015 variance to the image using the imnoise function. Display the noisy RGB image.
noisyRGB = imnoise(imRGB,'gaussian',0,0.0015);
imshow(noisyRGB)
Convert the noisy RGB image to the L*a*b color space, so that the non-local means filter smooths perceptually similar colors.
noisyLAB = rgb2lab(noisyRGB);
Extract a homogeneous L*a*b patch from the noisy background to compute the noise standard deviation.
roi = [210,24,52,41]; patch = imcrop(noisyLAB,roi);
In this L*a*b patch, compute the Euclidean distance from the origin, edist. Then, calculate the standard deviation of edist to estimate the noise.
patchSq = patch.^2; edist = sqrt(sum(patchSq,3)); patchSigma = sqrt(var(edist(:)));
Set the 'DegreeOfSmoothing' value to be higher than the standard deviation of the patch. Filter the noisy L*a*b* image using non-local means filtering.
DoS = 1.5*patchSigma;
denoisedLAB = imnlmfilt(noisyLAB,'DegreeOfSmoothing',DoS);Convert the filtered L*a*b image to the RGB color space. Display the filtered RGB image.
denoisedRGB = lab2rgb(denoisedLAB,'Out','uint8'); imshow(denoisedRGB)

Compare a patch from the noisy RGB image (left) and the same patch from the non-local means filtered RGB image (right).
roi2 = [178,68,110,110];
montage({imcrop(noisyRGB,roi2),imcrop(denoisedRGB,roi2)})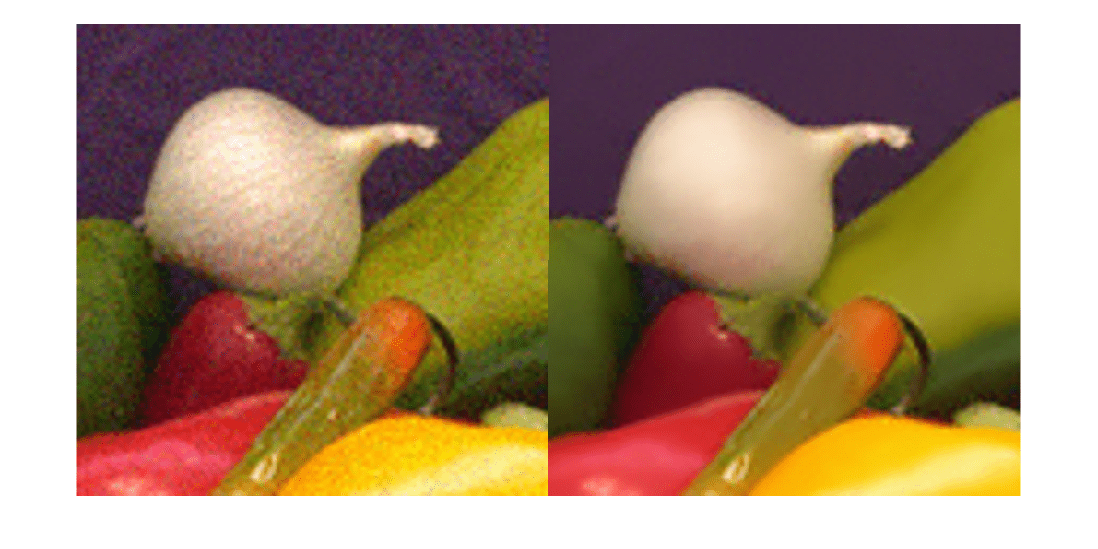
Input Arguments
Name-Value Arguments
Output Arguments
Tips
To smooth perceptually close colors in an RGB image, convert the image to the CIE L*a*b* color space using
rgb2labbefore applying the non-local means filter. To view the results, first convert the filtered L*a*b* image to the RGB color space usinglab2rgb.If the data type of
Iisdouble, then computations are performed in data typedouble. Otherwise, computations are performed in data typesingle.
Algorithms
References
[1] Buades, A., B. Coll, and J.-M. Morel. "A Non-Local Algorithm for Image Denoising." 2005 IEEE® Computer Society Conference on Computer Vision and Pattern Recognition. Vol. 2, June 2005, pp. 60–65.
[2] Immerkær, J. "Fast Noise Variance Estimation." Computer Vision and Image Understanding. Vol. 64, Number 2, Sept. 1996, pp. 300–302.