Image Data Acquisition
There are three ways to acquire images programmatically:
The
videoinputobject, for use with any type of supported hardwareThe
gigecamobject, for use with GigE Vision hardware onlyThe
matroxcamobject, for use with Matrox hardware only
The section Acquisition Using Any Hardware pertains to image acquisition
using the videoinput object with any type of supported
hardware. If you have GigE Vision or Matrox hardware, you can use the new interfaces for GigE Vision and Matrox, which provide new objects, gigecam and
matroxcam. Or you can continue to use the existing
GigE Vision and Matrox adaptors (gige and
matrox) with the videoinput
object. See Acquisition Using GigE Vision Hardware and Acquisition Using Matrox Hardware for more information on those
interfaces.
You can also acquire images from any type of supported hardware using the Image Acquisition Explorer, an app that enables you to set acquisition parameters, preview the image, and acquire images. For more information, see Acquisition Using Image Acquisition Explorer.
The functionality for all supported hardware is now available via the Support Package Installer. Starting with R2014a, each adaptor is available separately through the Support Package Installer, and you must install the appropriate support packages to use the toolbox with your hardware. For more information, see Image Acquisition Support Packages for Hardware Adaptors.
Categories
- Acquisition Using GigE Vision Hardware
Acquire images from GigE Vision cameras
- Acquisition Using Matrox Hardware
Acquire images from Matrox frame grabbers
- Acquisition Using Kinect for Windows Hardware
Acquire image and skeletal data from Kinect® for Windows®
- Acquisition Using Any Hardware
Specify acquisition parameters and acquire image data using the videoinput interface
- Acquisition Using Image Acquisition Explorer
Specify acquisition parameters and acquire image data using the Image Acquisition Explorer
Featured Examples
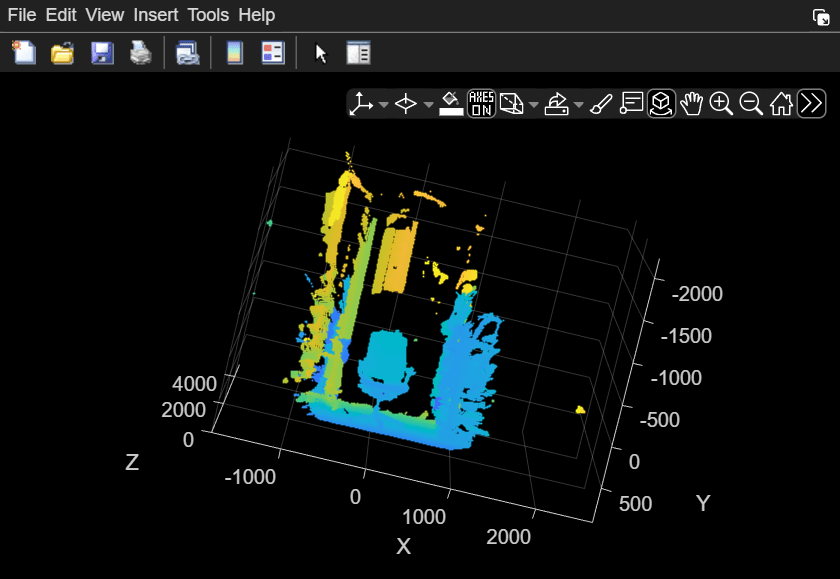
Acquire and View Point Cloud from Basler ToF blaze-101 Camera
Acquire and visualize a point cloud from a GenICam™ compliant Basler ToF blaze-101 camera.
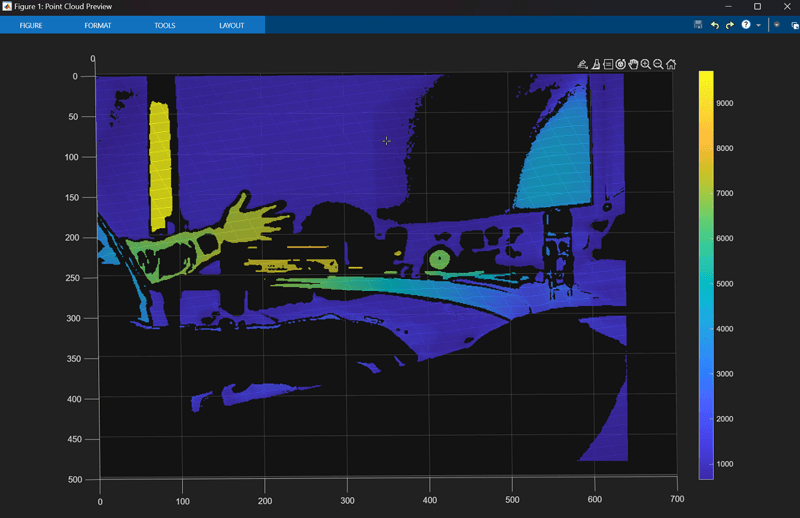
Acquire Depth Image from Basler ToF blaze-101 Camera and View as Point Cloud
Acquire a range map from a GenICam™ compliant Basler ToF blaze-101 camera and visualize it as a point cloud.
Inspect Bottle Fill Level During Live Image Acquisition
Detect an anomaly in a bottle fill level during live image acquisition using the caliper tool.

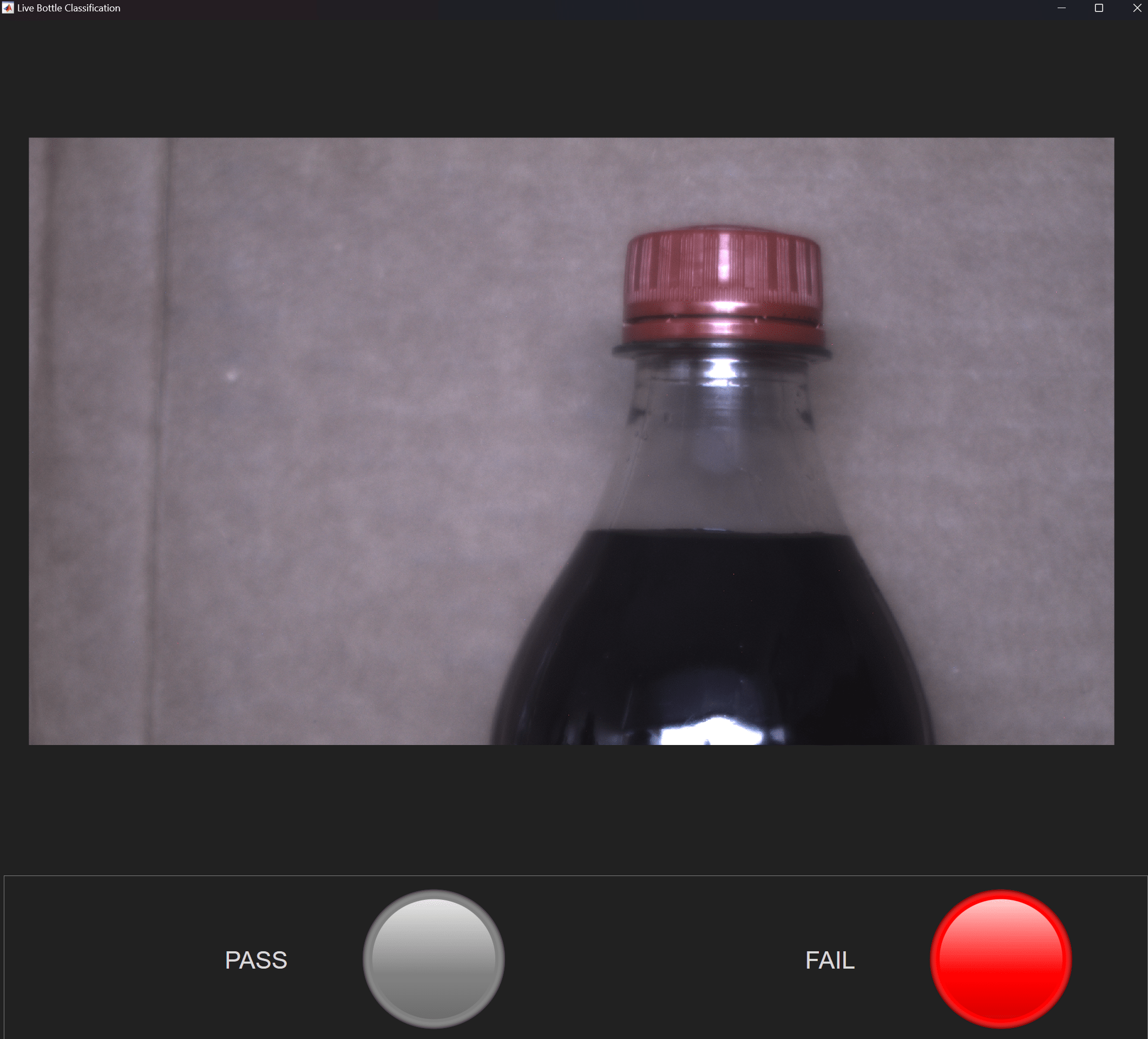
Create an App for Live Image Acquisition
Create an app for image acquisition.

Detect Anomalies in Pills During Live Image Acquisition
Detect anomalies in pills during live image acquisition.

Acquire and Analyze Images from FLIR Ax5 Thermal Infrared Camera
Acquire, preview, and analyze images from a FLIR Ax5 series thermal infrared camera in multiple ways.

Acquire Images Using Parallel Workers
Use the Parallel Computing Toolbox™ together with the Image Acquisition Toolbox™ to acquire and save images in a separate MATLAB® worker.

Alpha Blending Streamed Image Pairs
Capture streaming images from an image acquisition device, perform on-line image processing on each frame and display the processed frames.

Averaging Images over Time
Average images acquired over time.

Calculate the Length of a Pendulum in Motion
Capture and analyze images of an object in motion.

Color-Based Segmentation of Fabric Using the L*a*b Color Space
Acquire a single image frame of a piece of colorful fabric. The different colors in the fabric are identified using the L*a*b color space.

Determining the Rate of Acquisition
Use the timestamps provided by the GETDATA function, and estimate the device frame rate using MATLAB® functions.
Laser Tracking
Track a moving laser dot.
Logging Data at Constant Intervals
Log data at intervals instead of logging the entire acquisition.

Video Display with Live Histogram
Set up and display a live histogram.

Live Motion Detection Using Optical Flow
Create a video algorithm to detect motion using optical flow technique. This example uses the Image Acquisition Toolbox™ System object™ along with Computer Vision Toolbox™ System objects.
Creating Time-Lapse Video Using a Noncontiguous Acquisition
Create a time-lapse video without using all the frames of the acquisition.
Creating Time-Lapse Video Using Timer Events
Create a time-lapse video using timer events to prequalify frames.
Creating Time-Lapse Video Using Postprocessed Data
Create a time-lapse video by deleting unnecessary frames during postprocessing.
Get Hardware Metadata from GenICam Device
Acquire images from a GenICam™ device with hardware timestamps, CRC, and exposure time.