pcsegplanes
Syntax
Description
[
segments a point cloud into planar surfaces. labels,numPlanes] = pcsegplanes(ptCloud)pcsegplanes assigns an
integer planar surface label to each point in the point cloud, and returns the
labels of all points. The function also returns the number of
segmented planar surfaces.
The function uses the robust statistics approach for detecting planes. For more information on this approach, see [1].
[
additionally returns the normals of the segmented surface planes. labels,numPlanes,planeNormals] = pcsegplanes(ptCloud)
[___] = pcsegplanes(
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, ptCloud,Name=Value)MinNumPoints=100 sets the
minimum number of points that must be present to fit a planar surface to
100.
Examples
Load point cloud of a living room into the workspace.
ld = load("livingRoom.mat");
ptCloud = ld.livingRoomData{1};Visualize the input point cloud.
figure
pcshow(ptCloud,ViewPlane="YX")
Estimate the normals of the point cloud using the pcnormals function.
numNeighbors = 200; normals = pcnormals(ptCloud,numNeighbors); ptCloud.Normal = normals;
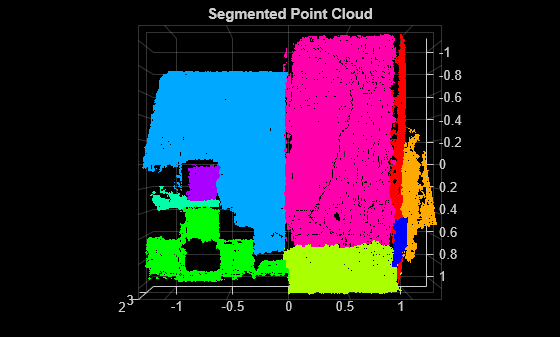
Segment the point cloud into planar surfaces.
[labels,numPlanes] = pcsegplanes(ptCloud,MinNumPoints=1000);
Select the valid labels to visualize the planes.
idxValidLabels = find(labels); validLabels = labels(idxValidLabels); segmentedPtCloud = select(ptCloud,idxValidLabels);
Visualize the point cloud planes.
figure colormap(hsv(numPlanes)) pcshow(segmentedPtCloud.Location,validLabels,ViewPlane="YX") title("Segmented Point Cloud")
Input Arguments
Name-Value Arguments
Output Arguments
References
[1] Araújo, Abner M. C., and Manuel M. Oliveira. “A Robust Statistics Approach for Plane Detection in Unorganized Point Clouds.” Pattern Recognition 100 (April 2020): 107115. https://doi.org/10.1016/j.patcog.2019.107115.
Version History
Introduced in R2024b