altimeterSensor
Altimeter simulation model
Description
The altimeterSensor
System object™ models receiving data from an altimeter sensor.
To model an altimeter:
Create the
altimeterSensorobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
Creation
Syntax
Description
altimeter = altimeterSensoraltimeterSensor
System object that simulates altimeter readings.
altimeter = altimeterSensor('ReferenceFrame',RF)altimeterSensor
System object that simulates altimeter readings relative to the reference frame
RF. Specify RF as 'NED'
(North-East-Down) or 'ENU' (East-North-Up). The default value is
'NED'.
altimeter = altimeterSensor(___,Name,Value)Name to the specified Value.
Unspecified properties have default values.
Properties
Usage
Description
altimeterReadings = altimeter(position)position
input.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
Create an altimeterSensor System object™ to model receiving altimeter sensor data. Assume a typical one Hz sample rate and a 10 minute simulation time. Set ConstantBias to 0.01, NoiseDensity to 0.05, BiasInstability to 0.05, and DecayFactor to 0.5.
Fs = 1; duration = 60*10; numSamples = duration*Fs; altimeter = altimeterSensor('SampleRate',Fs, ... 'ConstantBias',0.01, ... 'NoiseDensity',0.05, ... 'BiasInstability',0.05, ... 'DecayFactor',0.5); truePosition = zeros(numSamples,3);
Call altimeter with the specified truePosition to model noisy altimeter readings from a stationary platform.
altimeterReadings = altimeter(truePosition);
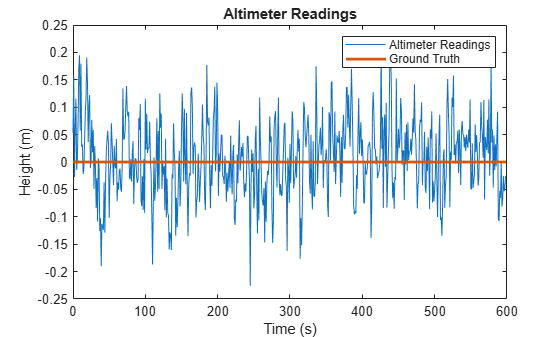
Plot the true position and the altimeter sensor readings for height.
t = (0:(numSamples-1))/Fs; plot(t,altimeterReadings) hold on plot(t,truePosition(:,3),'LineWidth',2) hold off title('Altimeter Readings') xlabel('Time (s)') ylabel('Height (m)') legend('Altimeter Readings','Ground Truth')
Extended Capabilities
Version History
Introduced in R2019a