Using fminimax with a Simulink Model
This example shows how to tune the parameters of a Simulink® model. The model, optsim, is included when you run this example. The model includes a nonlinear process plant modeled as a Simulink block diagram.

Plant with Actuator Saturation
The plant is an under-damped third-order model with actuator limits. The actuator limits are a saturation limit and a slew rate limit. The actuator saturation limit cuts off input values greater than 2 units or less than –2 units. The slew rate limit of the actuator is 0.8 units/sec. The closed-loop response of the system to a step input is shown in Closed-Loop Response. You can see this response by opening the model (type optsim at the command line or click the model name), and selecting Run from the Simulation menu. The response plots to the scope.
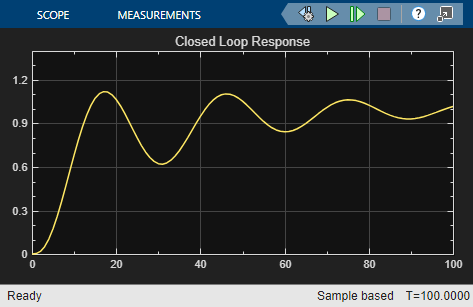
Closed-Loop Response
The problem is to design a feedback control loop that tracks a unit step input to the system. The closed-loop plant is entered in terms of the blocks where the plant and actuator are located in a hierarchical Subsystem block. A Scope block displays output trajectories during the design process.
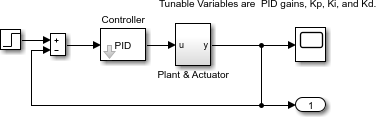
Closed-Loop Model
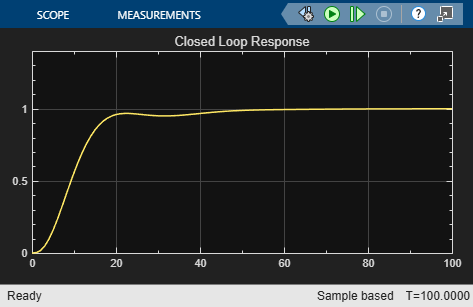
To optimize this system, minimize the maximum value of the output at any time between 0 and 100. (In contrast, in the example lsqnonlin with a Simulink Model, the solution involves minimizing the error between the output and the input signal.)
The code for this example is contained in the helper function runtrackmm at the end of this example. The objective function is simply the output yout returned by the sim command. But minimizing the maximum output at all time steps might force the output to be far below unity for some time steps. To keep the output above 0.95 after the first 20 seconds, the constraint function trackmmcon contains the constraint yout >= 0.95 from t = 20 to t = 100. Because constraints must be in the form , the constraint in the function is g = -yout(20:100) + 0.95.
Both trackmmobj and trackmmcon use the result yout from sim, calculated from the current PID values. To avoid calling the simulation twice, runtrackmm has nested functions so that the value of yout is shared between the objective and constraint functions. The simulation is called only when the current point changes.
Call runtrackmm.
[Kp,Ki,Kd] = runtrackmm
Objective Max Line search Directional
Iter F-count value constraint steplength derivative Procedure
0 5 0 1.11982
1 11 1.184 0.07978 1 0.482
2 17 1.012 0.04285 1 -0.236
3 23 0.9996 0.00397 1 -0.0195 Hessian modified twice
4 29 0.9996 3.464e-05 1 0.000687 Hessian modified
5 35 0.9996 2.273e-09 1 -0.0175 Hessian modified twice
Local minimum possible. Constraints satisfied.
fminimax stopped because the predicted change in the objective function
is less than the value of the function tolerance and constraints
are satisfied to within the value of the constraint tolerance.
<stopping criteria details>
Kp = 0.5894
Ki = 0.0605
Kd = 5.5295
The last value in the Objective value column of the output shows that the maximum value for all the time steps is just under 1.
This solution differs from the solution obtained in lsqnonlin with a Simulink Model because you are solving different problem formulations.
Helper Function
The following code creates the runtrackmm helper function.
function [Kp, Ki, Kd] = runtrackmm mdl = "optsim"; open_system(mdl) % Load the model in = Simulink.SimulationInput(mdl); % Create simulation input object in = in.setModelParameter(StopTime="100"); % Stop time 100 pid0 = [0.63 0.0504 1.9688]; % Initial gain values a1 = 3; a2 = 43; % Initialize model plant variables pold = []; % Initialize pold yout = []; % Initialize yout options = optimoptions(@fminimax,Display="iter",... StepTolerance=0.001,FunctionTolerance=0.001); % Optimize the gains set_param(mdl,FastRestart="on"); % Fast restart pid = fminimax(@trackmmobj,pid0,[],[],[],[],[],[],... @trackmmcon,options); set_param(mdl,FastRestart="off"); % Return the gains Kp = pid(1); Ki = pid(2); Kd = pid(3); function F = trackmmobj(pid) % Track the output of optsim to a signal of 1. % Variables a1 and a2 are shared with runtrackmm. % Variable yout is shared with runtrackmm and % trackmmcon. updateIfNeeded(pid) F = yout.yout; end function [ineqnonlin,eqnonlin] = trackmmcon(pid) % Track the output of optsim to a signal of 1. % Variable yout is shared with runtrackmm and % trackmmobj. updateIfNeeded(pid) ineqnonlin = -yout.yout(20:100)+.95; eqnonlin=[]; end function updateIfNeeded(pid) if ~isequal(pid,pold) % Compute only if needed. in = in.setVariable(Kp=pid(1),Workspace=mdl); in = in.setVariable(Ki=pid(2),Workspace=mdl); in = in.setVariable(Kd=pid(3),Workspace=mdl); % Simulate yout = sim(in); pold = pid; end end end