phased.PartitionedArray
Partition phased array into subarrays
Description
The phased.PartitionedArray
System object™ represents a phased array that is partitioned into subarrays. To create a
partitioned array and to obtain the response of its subarrays:
Create the
phased.PartitionedArrayobject and set its properties.Call the object with arguments, as if it were a function.
To learn more about how System objects work, see What Are System Objects?
You can also specify a phased.PartitionedArray
System object as the value of the SensorArray or
Sensor property of objects that perform beamforming, steering,
and other operations.
Creation
Description
array = phased.PartitionedArrayarray
System object. The partitions are called subarrays.
array = phased.PartitionedArray(Name=Value)array
System object, with each specified property Name set to the
specified Value. You can specify additional name-value
arguments in any order as
(Name1=Value1,...,NameN=ValueN).
Properties
Usage
Description
RESP = array(FREQ,ANG,V)RESP of the subarrays in the array,
at operating frequencies specified in FREQ and directions
specified in ANG. The phase center of each subarray is at
its geometric center. V is the propagation speed. The
elements within each subarray are connected to the subarray phase center using
an equal-path feed.
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
Input Arguments
Output Arguments
Object Functions
To use an object function, specify the
System object as the first input argument. For
example, to release system resources of a System object named obj, use
this syntax:
release(obj)
Examples
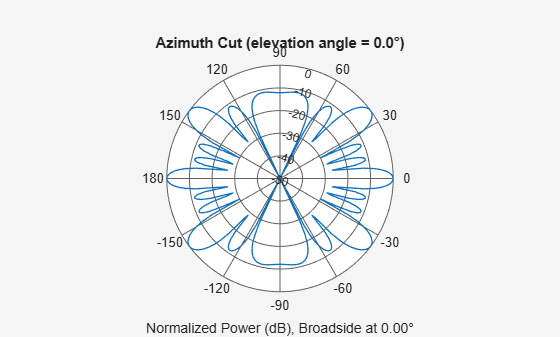
Plot the azimuth response of a 4-element ULA partitioned into two 2-element ULAs. The element spacing is one-half wavelength.
Create the ULA, and partition it into two 2-element ULAs.
sULA = phased.ULA(NumElements=4,ElementSpacing=0.5);
sPA = phased.PartitionedArray(Array=sULA, ...
SubarraySelection=[1 1 0 0;0 0 1 1]);Plot the azimuth response of the array. Assume the operating frequency is 1 GHz and the propagation speed is the speed of light.
fc = 1e9; pattern(sPA,fc,[-180:180],0,Type="powerdb", ... CoordinateSystem="polar", ... Normalize=true)
Calculate the response at boresight of a 4-element ULA partitioned into two 2-element ULAs.
Set up the partitioned array.
hula = phased.ULA(NumElements=4,ElementSpacing=0.5);
partitionedarray = phased.PartitionedArray(Array=hula, ...
SubarraySelection=[1 1 0 0;0 0 1 1]);Calculate the response of the subarrays at boresight. Assume the operating frequency is 1 GHz and the propagation speed is the speed of light.
resp = partitionedarray(1.0e9,[0;0],physconst("Lightspeed"))resp = 2×1
2
2
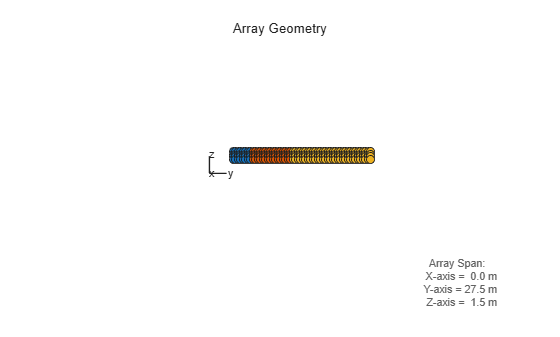
Create a partitioned URA array with three subarrays of different sizes. The subarrays have 8, 16, and 32 elements. Use different sets of subarray element weights for each subarray.
Create a 4-by-56 element URA.
antenna = phased.IsotropicAntennaElement;
fc = 300e6;
c = physconst("LightSpeed");
lambda = c/fc;
n1 = 2^3;
n2 = 2^4;
n3 = 2^5;
nrows = 4;
ncols = n1 + n2 + n3;
array = phased.URA(Element=antenna,Size=[nrows,ncols]);Select the three subarrays by setting the selection matrix.
sel1 = zeros(nrows,ncols); sel2 = sel1; sel3 = sel1; sel = zeros(3,nrows*ncols); for r = 1:nrows sel1(r,1:n1) = 1; sel2(r,(n1+1):(n1+n2)) = 1; sel3(r,((n1+n2)+1):ncols) = 1; end sel(1,:) = sel1(:); sel(2,:) = sel2(:); sel(3,:) = sel3(:);
Create the partitioned array.
partarray = phased.PartitionedArray(Array=array, ... SubarraySelection=sel,SubarraySteering="Custom"); viewArray(partarray,ShowSubarray="All");
Set weights for each subarray and get the response of each subarray. Put the weights in a cell array.
wts1 = ones(nrows*n1,1);
wts2 = 1.5*ones(nrows*n2,1);
wts3 = 3*ones(nrows*n3,1);
resp = partarray(fc,[30;0],c,{wts1,wts2,wts3})resp = 3×1 complex
0.0246 + 0.0000i
0.0738 - 0.0000i
0.2951 - 0.0000i
References
[1] Van Trees, H.L. Optimum Array Processing. New York: Wiley-Interscience, 2002.
Extended Capabilities
Version History
Introduced in R2012a
See Also
Functions
Objects
phased.ULA|phased.URA|phased.UCA|phased.ConformalArray|phased.ReplicatedSubarray|sidelobelevel