bistaticConstantSNR
Syntax
Description
Use bistaticConstantSNR to create, plot, and optionally output
bistatic constant SNR (Signal to Noise Ratio) contours or surfaces, also known as ovals of
Cassini or Cassini surfaces. Unlike for monostatic radars, bistatic radar systems have
separate transmitter and receiver elements that are not co-located. The
bistaticConstantSNR function assumes the bistatic transmitter and receiver are
synchronized.
bistaticConstantSNR(
creates and plots bistatic constant SNR contours or surfaces, with additional options
specified using one or more name-value arguments.txpos,rxpos,K,Name=Value)
Examples
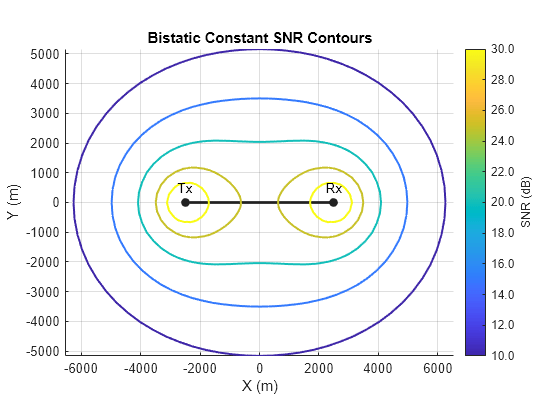
This example shows how to plot constant SNR contours (ovals of Cassini) for a bistatic radar and calculate the bistatic radar constant, K.
Calculate Bistatic Radar Constant (K) and Plot Constant SNR Contours
Plot ovals of Cassini for a bistatic radar operating at a frequency of 5.6 GHz and a peak power of 1.5 MW. The transmitter and receiver are 5 km apart. Assume a bistatic target radar cross section (RCS) of 0.1 and a rectangular waveform with a pulse width of 0.2 microseconds. The transmitter gain is 20 dB and the receiver gain is 10 dB. Assume no system loss.
% Inputs freq = 5.6e9; % Radar operating frequency (Hz) lambda = freq2wavelen(freq); % Wavelength (m) Pt = 1.5e6; % Peak power (W) tau = 0.2e-6; % Pulse width (s) sigma = 0.1; % Bistatic radar cross section (m^2) Gtx = 20; % Transmitter gain (dB) Grx = 10; % Receiver gain (dB) txpos = [-2.5e3 0]; % Transmitter position (m) rxpos = [2.5e3 0]; % Receiver position (m) % Calculate bistatic radar constant K (dB) K = radareqsnr(lambda,1,Pt,tau,rcs=sigma,gain=[Gtx Grx]); % Plot bistatic constant SNR contours bistaticConstantSNR(txpos,rxpos,K)
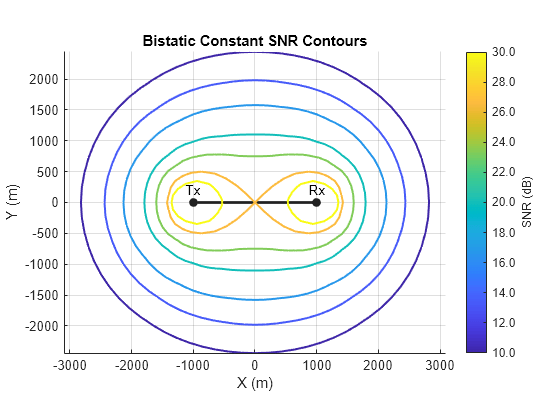
This example shows how to plot constant SNR contours (ovals of Cassini) for a bistatic radar at specified SNR values. Include the cusp that denotes the transmitter-centered and receiver-centered operational regions.
Plot Constant SNR Contours
Plot ovals of Cassini for a bistatic radar that has a bistatic radar constant, K, given by where L is the distance between the transmitter and receiver. Plot contours at SNRs of [10 13 16 20 23 30] and include the cusp.
% Inputs txpos = [-1e3 0]; % Transmitter position (m) rxpos = [1e3 0]; % Receiver position (m) L = norm(txpos - rxpos); % Baseline distance (m) K = pow2db(30*L^4); % Bistatic radar constant K (dB) SNRs = [10 13 16 20 23 30]; % SNRs (dB) % Plot bistatic constant SNR contours bistaticConstantSNR(txpos,rxpos,K,SNR=SNRs,IncludeCusp=true)
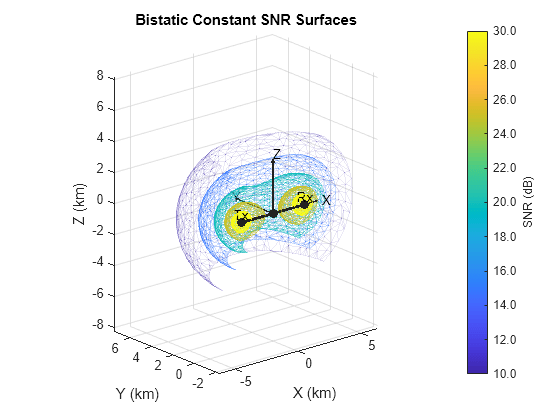
This example shows how to plot constant SNR surfaces (Cassini surfaces) at specified azimuth and elevation angles for a bistatic radar.
Plot Constant SNR Surfaces
Plot Cassini surfaces for a bistatic radar operating at a frequency of 5.6 GHz and a peak power of 1.5 MW. Limit the plot to cover 0 to 180 degrees in azimuth and -45 to 45 degrees in elevation and plot in km. The transmitter and receiver are 5 km apart. Assume a bistatic target RCS of 0.1 and a rectangular waveform with a pulse width of 0.2 microseconds. The transmitter gain is 20 dB and the receiver gain is 10 dB. Assume no system loss.
% Inputs freq = 5.6e9; % Radar operating frequency (Hz) lambda = freq2wavelen(freq); % Wavelength (m) Pt = 1.5e6; % Peak power (W) tau = 0.2e-6; % Pulse width (s) sigma = 0.1; % Bistatic radar cross section (m^2) Gtx = 20; % Transmitter gain (dB) Grx = 10; % Receiver gain (dB) txpos = [-2.5e3 0 0]; % Transmitter position (m) rxpos = [2.5e3 0 0]; % Receiver position (m) % Calculate bistatic radar constant K (dB) K = radareqsnr(lambda,1,Pt,tau,rcs=sigma,gain=[Gtx Grx]); % Plot bistatic constant SNR surfaces bistaticConstantSNR(txpos,rxpos,K, ... PlotUnits="km",AzimuthLimits=[0 180],ElevationLimits=[-45 45], ... ShowLocalCoordinates=true) view([-40 20])
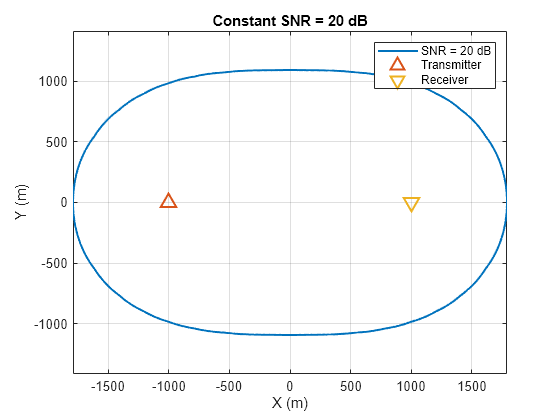
This example shows how to output and manually plot constant SNR contour data for a bistatic radar at a specified SNR value.
Calculate Constant SNR Contour
Calculate the oval of Cassini at an SNR of 20 dB for a bistatic radar that has a bistatic radar constant, K, given by where L is the distance between the transmitter and receiver. Manually plot the results.
% Inputs txpos = [-1e3 0]; % Transmitter position (m) rxpos = [1e3 0]; % Receiver position (m) L = norm(txpos - rxpos); % Baseline distance (m) K = pow2db(30*L^4); % Bistatic radar constant K (dB) % Calculate bistatic constant SNR contour M = bistaticConstantSNR(txpos,rxpos,K,SNR=20,NumSamples=1e3)
M = struct with fields:
X: [-1.7892e+03 -1.7892e+03 -1.7890e+03 -1.7886e+03 -1.7882e+03 -1.7876e+03 -1.7869e+03 -1.7861e+03 -1.7852e+03 -1.7841e+03 -1.7829e+03 -1.7816e+03 -1.7801e+03 -1.7785e+03 -1.7768e+03 -1.7749e+03 -1.7730e+03 -1.7709e+03 … ] (1×1028 double)
Y: [-2.1912e-13 -11.2530 -22.5045 -33.7530 -44.9970 -56.2350 -67.4655 -78.6870 -89.8980 -101.0970 -112.2823 -123.4525 -134.6060 -145.7412 -156.8565 -167.9503 -179.0210 -190.0669 -201.0865 -212.0779 -223.0396 -233.9698 -244.8667 … ] (1×1028 double)
SNR: 20
% Plot figure plot(M.X,M.Y,'LineWidth',1.5) hold on plot(txpos(1),txpos(2),'^','LineWidth',1.5,'MarkerSize',10) plot(rxpos(1),rxpos(2),'v','LineWidth',1.5,'MarkerSize',10) grid on axis equal xlabel('X (m)') ylabel('Y (m)') legend('SNR = 20 dB','Transmitter','Receiver') title('Constant SNR = 20 dB')
Input Arguments
Name-Value Arguments
Output Arguments
More About
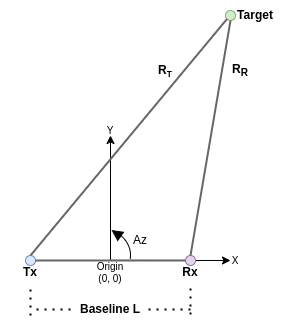
The image below shows the bistatic geometry for the 2-D case. The transmitter and receiver
sites reside along the x-axis. In the
bistaticConstantSNR function, the positive x-axis
is the unit vector pointing from txpos to rxpos. The
baseline L, or direct path, is defined as the line between the
transmitter Tx and receiver Rx. The line from the
transmitter to the target is the range RT and the
range from the receiver to the target is the range
RR. The azimuth is the counterclockwise angle in
the x-y plane measured from the positive
x-axis, in units of degrees. As shown, the origin for the local
coordinate system is the center point of the bistatic baseline L.
An oval of Cassini is the locus of the vertex of a triangle when the product of the sides adjacent to the vertex is constant and the length of the opposite side is fixed [1]. For the bistatic case, the vertex is the target. The sides adjacent to the vertex are RT and RR. The baseline L is the fixed, opposite side. The bistatic ovals of Cassini are contours of constant signal-to-noise-ratio (SNR) on any bistatic plane.
SNR = K / (RT2RR2),
where K is the bistatic radar constant.
References
[1] Willis, Nicholas J. Bistatic Radar. Raleigh, NC: SciTech Publishing, Inc., 2005.
Version History
Introduced in R2024b