constraintDistanceBounds
Description
The constraintDistanceBounds object describes a constraint on the
distance of one body (the end effector) relative to another body (the reference body) within
the same rigidBodyTree. This constraint is satisfied if
the distance, d, of the end effector origin relative to the reference body
origin frame is within the specified bounds.
Creation
Syntax
Description
distConst = constraintDistanceBounds(endeffector)distConst, that
represents a constraint on distance between the specified endeffector
and the reference body specified by the ReferenceBody
property.
distConst = constraintDistanceBounds(endeffector,Name=Value)
Properties
Examples
Create a constraintDistanceBounds object and observe its effect on an inverse kinematics solution.
Load Robot and Set Up Solver
Load a Universal UR5e robot into the workspace, and create a generalized inverse kinematics solver.
rng default; robot = loadrobot("universalUR5e",DataFormat="column"); gik = generalizedInverseKinematics("RigidBodyTree",robot);
Set the constraint inputs distance for a distance bounds constraint, and position for the target constraint.
gik.ConstraintInputs = {'distance','position'};
gik.SolverParameters.MaxIterations = 100;Create Distance Bounds Constraint
Create Distance Bounds constraint to constrain the origin of the end effector body, tool0, relative to the origin of the reference frame, base.
constrDist = constraintDistanceBounds("tool0",ReferenceBody="base");
Set the minimum distance between two bodies to 0.25 meters, and the maximum distance to 0.5 meters. This constraint prevents the inverse kinematics solver from solving for a configuration that violates the bounds.
minDist = 0.25; maxDist = 0.5; constrDist.Bounds = [minDist maxDist];
Constrain the first wrist link, wrist_1_link, to a target position to add some complexity.
forearmTgt = constraintPositionTarget('wrist_1_link');
forearmTgt.TargetPosition = [0.0 0.25 0.25];Visualize Constraint
Run the solver through three random configurations, using the constraints, and then display the solver status. Each iteration, the solver finds a solution where the distance of the end effector is either equal to or within the specified bounds. Visualize the bounds by using the exampleHelperVisualizeBounds helper function to plot the distance bounds as two transparent spheres.
for i = 1:3 figure q0 = randomConfiguration(robot); % Initial guess for solver [q,solutionInfo] = gik(q0,constrDist,forearmTgt); show(robot,q); view(90,0) hold on exampleHelperVisualizeBounds(minDist,maxDist) hold off eeDist = norm(tform2trvec(getTransform(robot,q,"tool0"))); display(["Solver Status: ",solutionInfo.Status]) display(["End Effector Distance: ",num2str(eeDist)]) end
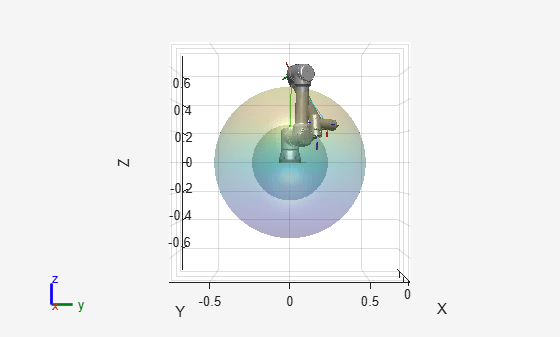
1×2 string array
"Solver Status: " "success"
1×2 string array
"End Effector Distance: " "0.25"
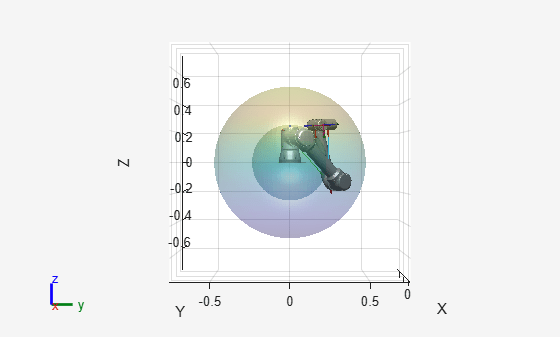
1×2 string array
"Solver Status: " "success"
1×2 string array
"End Effector Distance: " "0.35589"
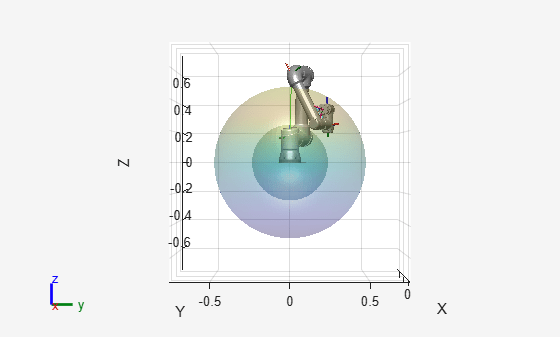
1×2 string array
"Solver Status: " "success"
1×2 string array
"End Effector Distance: " "0.42217"