Nonlinear Translational Spring
Translational spring based on polynomial or table lookup parameterizations

Libraries:
Simscape /
Driveline /
Couplings & Drives /
Springs & Dampers
Description
The Nonlinear Translational Spring block represents a translational spring with a nonlinear force-displacement curve. The spring force magnitude is a general function of displacement and does not necessarily need to satisfy Hooke’s law. You can parameterize the force-displacement relationship using a polynomial or a lookup table. The spring force can be symmetric or asymmetric with respect to zero deformation.
The symmetric polynomial parameterization defines spring force according to the expression
where:
F is the spring force.
k1, k2, ..., k5 are the spring coefficients.
x is the relative displacement between ports R and C.
xinit is the initial relative displacement.
At simulation start x is equal to xinit.
To avoid zero-crossings that slow simulation, eliminate the sign function from the polynomial expression by specifying an odd polynomial (b2,b4 = 0).
The asymmetric polynomial parameterization defines spring force according to the expression:
where:
k1, k2, ..., k5 are the spring tension coefficients.
k1, k2, ..., k5 are the spring compression coefficients.
Both polynomial parameterizations use a fifth-order polynomial expression. To use a lower-order polynomial, set the unneeded higher-order coefficients to zero. To use a higher-order polynomial, fit to a lower-order polynomial or use the table lookup parameterization.
Setting Parameterization to By table lookup
defines the damping torque based on a set of torque and angular velocity vectors. If you
do not enter a datapoint for the origin, the block automatically adds one (zero angular
velocity and zero torque).
Variables
To set the priority and initial target values for the block variables prior to simulation, use the Initial Targets section in the block dialog box or Property Inspector. For more information, see Set Priority and Initial Target for Block Variables.
Nominal values provide a way to specify the expected magnitude of a variable in a model. Using system scaling based on nominal values increases the simulation robustness. Nominal values can come from different sources, one of which is the Nominal Values section in the block dialog box or Property Inspector. For more information, see Modify Nominal Values for a Block Variable.
Examples
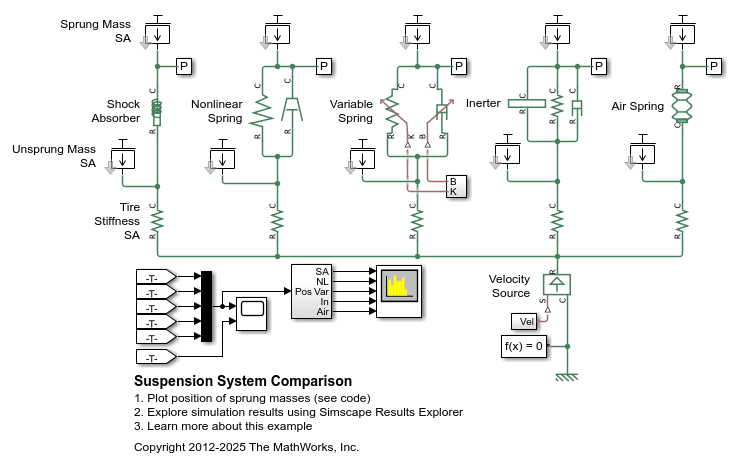
Suspension System Comparison
A testbed containing five suspensions, excited by the same oscillating velocity source. The sprung and unsprung masses in each suspension branch may represent a quarter of the vehicle mass and the tire mass, respectively, and the velocity source may correspond to an uneven road profile.
Ports
Conserving
Parameters
Extended Capabilities
Version History
Introduced in R2013a