Memory
Output input from previous time step
Libraries:
Simulink /
Discrete
HDL Coder /
Discrete
Description
The Memory block holds and delays its input by one major integration time step. When placed in an iterator subsystem, it holds and delays its input by one iteration. This block accepts continuous and discrete signals. The block accepts one input and generates one output. Each signal can be a scalar, vector, matrix, or N-D array. If the input is non-scalar, the block holds and delays all elements of the input by the same time step.
You specify the block output for the first time step using the Initial condition parameter. Careful selection of this parameter can minimize unwanted output behavior. However, you cannot specify the sample time. This block’s sample time depends on the type of solver used, or you can specify to inherit it. The Inherit sample time parameter determines whether sample time is inherited or based on the solver.
Tip
Avoid using the Memory block when both these conditions are true:
Your model uses the variable-step solver
ode15sorode113.The input to the block changes during simulation.
When the Memory block inherits a discrete sample time, the block is analogous to the Unit Delay block. However, the Memory block does not support state logging. If logging the final state is necessary, use a Unit Delay block instead.
Comparison with Similar Blocks
The Memory, Unit Delay, and Zero-Order Hold blocks provide similar functionality but have different capabilities. Also, the purpose of each block is different.
This table shows recommended usage for each block.
| Block | Purpose of the Block | Reference Examples |
|---|---|---|
| Unit Delay | Implement a delay using a discrete sample time that you specify. The block accepts and outputs signals with a discrete sample time. |
|
| Memory | Implement a delay by one major integration time step. Ideally, the block accepts continuous (or fixed in minor time step) signals and outputs a signal that is fixed in minor time step. |
|
| Zero-Order Hold | Convert an input signal with a continuous sample time to an output signal with a discrete sample time. |
Each block has the following capabilities.
| Capability | Memory | Unit Delay | Zero-Order Hold |
|---|---|---|---|
| Specification of initial condition | Yes | Yes | No, because the block output at time t = 0 must match the input value. |
| Specification of sample time | No, because the block can only inherit sample time from the driving block or the solver used for the entire model. | Yes | Yes |
| Support for frame-based signals | No | Yes | Yes |
| Support for state logging | No | Yes | No |
Bus Support
The Memory block is a bus-capable block. The input can be a virtual or nonvirtual bus signal subject to the following restrictions:
Initial condition must be zero, a nonzero scalar, or a finite numeric structure.
If Initial condition is zero or a structure, and you specify a State name, the input cannot be a virtual bus.
If Initial condition is a nonzero scalar, you cannot specify a State name.
For information about specifying an initial condition structure, see Specify Initial Conditions for Bus Elements.
All signals in a nonvirtual bus input to a Memory block must have the same sample time, even if the elements of the associated bus object specify inherited sample times. You can use a Rate Transition block to change the sample time of an individual signal, or of all signals in a bus. See Modify Sample Times for Nonvirtual Buses and Bus-Capable Blocks for more information.
You can use an array of buses as an input signal to a Memory block. You can specify the Initial condition parameter with:
The value
0. In this case, all the individual signals in the array of buses use the initial value0.An array of structures that specifies an initial condition for each of the individual signals in the array of buses.
A scalar structure that specifies an initial condition for each of the elements that the bus type defines. Use this technique to specify the same initial conditions for each of the buses in the array.
For details about defining and using an array of buses, see Group Nonvirtual Buses in Arrays of Buses.
Examples
This example shows how to use the Memory and Clock blocks to calculate and display the step size in a simulation. The Sum block subtracts the time at the previous time step, which the Memory block generates, from the current time, which the Clock block generates.

Because Inherit sample time is not selected for the Memory block, the block sample time depends on the type of solver for simulating the model. In this case, the model uses a fixed-step solver. Therefore, the sample time of the Memory block is the solver step size, or 1.
If you replace the Memory block with a Unit Delay block, you get the same results. The Unit Delay block inherits a discrete sample time of 1.
Extended Examples

Capture the Velocity of a Bouncing Ball with the Memory Block
The sldemo_bounce example shows how to use the Second-Order
Integrator and Memory blocks to capture the velocity of a bouncing ball just
before it hits the ground.
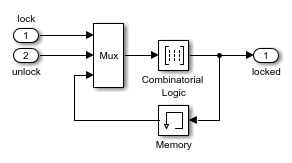
Implement a Finite-State Machine with the Combinatorial Logic and Memory Blocks
The sldemo_clutch example shows how you can use the Memory
block with the Combinatorial Logic block to implement a finite-state
machine.